Но можно построить счетчик всего на одной микросхеме - универсальном программируемом микроконтроллере, имеющем в своем составе разнообразные периферийные устройства и способном решать очень широкий круг задач. Многие микроконтроллеры имеют особую область памяти - EEPROM. Записанные в нее (в том числе во время исполнения программы) данные, например, текущий результат счета, сохраняются и после отключения питания.
В предлагаемом счетчике применен микроконтроллер Attiny2313 из семейства AVR фирмы Almel. В приборе реализован реверсивный счет, вывод результата с гашением незначащих н
улей на четырехразрядный светодиодный индикатор, хранение результата в EEPROM при выключенном питании. Встроенный в микроконтроллер аналоговый компаратор использован для своевременного обнаружения уменьшения напряжения питания. Счетчик запоминает результат счета при отключении питания, восстанавливая его при включении, и аналогично механическому счетчику снабжен кнопкой обнуления показаний.
Схема счетчика представлена на рисунке. Шесть линий порта В (РВ2- РВ7) и пять линий порта D (PDO, PD1, PD4-PD6) использованы для организации динамической индикации результата счета на светодиодный индикатор HL1. Коллекторными нагрузками фототранзисторов VT1 и VT2 служат встроенные в микроконтроллер и включенные программно резисторы, соединяющие соответствующие выводы микроконтроллера с цепью его питания.
Увеличение результата счета N на единицу происходит в момент прерывания оптической связи между излучающим диодом VD1 и фототранзистором VT1, что создает нарастающий перепад уровня на входе INT0 микроконтроллера. При этом уровень на входе INT1 должен быть низким, т. е. фототранзистор VT2 должен быть освещен излучающим диодом VD2. В момент нарастающего перепада на входе INT1 при низком уровне на входе INT0 результат уменьшится на единицу. Другие комбинации уровней и их перепадов на входах INT0 и INT1 результат счета не изменяют.
По достижении максимального значения 9999 счет продолжается с нуля. Вычитание единицы из нулевого значения дает результат 9999. Если обратный счет не нужен, можно исключить из счетчика излучающий диод VD2 и фототранзистор VT2 и соединить вход INT1 микроконтроллера с общим проводом. Счет будет идти только на увеличение.
Как уже сказано, детектором снижения напряжения питания служит встроенный в микроконтроллер аналоговый компаратор. Он сравнивает нестабилизированное напряжение на выходе выпрямителя (диодного моста VD3) со стабилизированным на выходе интегрального стабилизатора DA1. Программа циклически проверяет состояние компаратора. После отключения счетчика от сети напряжение на конденсаторе фильтра выпрямителя С1 спадает, а стабилизированное еще некоторое время остается неизменным. Резисторы R2-R4 подобраны так. что состояние компаратора в этой ситуации изменяется на противоположное. Обнаружив это, программа успевает записать текущий результат счета в EEPROM микроконтроллера еще до прекращения его функционирования по причине выключения питания. При последующем включении программа прочитает число, записанное в ЕЕРРОМ, и выведет его на индикатор. Счет будет продолжен с этого значения.
Ввиду ограниченного числа выводов микроконтроллера для подключения кнопки SB1, обнуляющей счетчик, использован вывод 13, служащий инвертирующим аналоговым входом компаратора (AIM) и одновременно - "цифровым" входом РВ1. Делителем напряжения {резисторы R4, R5) здесь задан уровень, воспринимаемый микроконтроллером как высокий логический При нажатии на кнопку SB1 он станет низким. На состояние компаратора это не повлияет, так как напряжение на входе AIN0 по-прежнему больше, чем на AIN1.
При нажатой кнопке SB1 программа выводит во всех разрядах индикатора знак "минус", а после ее отпускания начинает счет с нуля. Если при нажатой кнопке выключить питание счетчика, текущий результат не будет записан в EEPROM, а хранящееся там значение останется прежним.
Программа построена таким образом, что ее легко адаптировать к счетчику с другими индикаторами (например, с общими катодами), с другой разводкой печатной платы и т. п. Небольшая коррекция программы потребуется и при использовании кварцевого резонатора на частоту, отличающуюся более чем на 1 МГц от указанной.
При напряжении источника 15 В измеряют напряжение на контактах 12 и 13 панели микроконтроллера относительно общего провода (конт.10). Первое должно находиться в интервале 4...4.5 В, а второе - быть больше 3,5 В, но меньше первого. Далее постепенно уменьшают напряжение источника. Когда оно упадет до 9... 10 В, разность значений напряжения на контактах 12 и 13 должна стать нулевой, а затем поменять знак.
Теперь можно установить в панель запрограммированный микроконтроллер, подключить трансформатор и подать на него сетевое напряжение. Спустя 1,5...2 с нужно нажать на кнопку SB1. На индикатор счетчика будет выведена цифра 0. Если на индикатор ничего не выведено, еще раз проверьте значения напряжения на входах AIN0.AIN1 микроконтроллера. Первое должно быть больше второго.


Когда счетчик успешно запущен, остается проверить правильность счета, поочередно затеняя фототранзисторы непрозрачной для ИК лучей пластиной. Для большей контрастности индикаторы желательно закрыть светофильтром из красного органического стекла.

Еще если кто будет собирать счётчик на Atiny2313 без кварца,
Фьюзы я запрограммировал так

исходник ASM
Прошивка
В радиолюбительской практике, часто возникает необходимость намотать/перемотать различные обмотки трансформаторов, дросселей, реле и др. .
При разработке данного станка, ставились следующие задачи:
1. Малые габариты.
2. Плавный старт шпинделя.
3. Счётчик до 10000 витков (9999).
4. Намотка с автоматической укладкой провода. Шаг укладки (диаметр провода) 0.02 - 0.4мм.
5. Возможность намотки секционных обмоток без перенастройки.
6. Возможность закрепления и намотки каркасов без центрального отверстия.

Рисунок 1.
Внешний вид намоточного станка.
Состав намоточного станка.
1. Подающая бобина (катушка с проводом).
2. Притормаживание (тормозной механизм).
3. Шаговый двигатель центровки бобины.
4. Шариковые мебельные направляющие.
5. Шторка оптических датчиков механизма центровки бобины.
6. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
7. Кнопки ручного переключения направления укладки.
8. Светодиоды направления укладки.
9. Шаговый двигатель позиционера.
10. Шторки оптических датчиков границы намотки.
11. Винт позиционера.
12. Шариковые мебельные направляющие.
13. Наматываемая катушка.
14. Двигатель намотки.
15. Счётчик витков.
16. Кнопки настройки.
17. Оптический датчик синхронизации.
18. Регулятор скорости.
Устройство и принцип действия.
Подающий узел.
Подающий узел предназначен для закрепления на нём бобины с проводом, различных величин, и обеспечения натяжения провода.
В него входит механизм крепления бобин и механизм подтормаживания вала.

Рисунок 2.
Подающий узел.
Подтормаживание.
Без подтормаживания подающей бобины, намотка провода на каркасах будет рыхлая и качественной намотки не получится. Войлочная лента «2», тормозит барабан «1». Поворот рычага «3», натягивает пружину «4» - регулировка силы торможения. Для разной толщины провода, настраивается своё притормаживание. Здесь используются готовые детали видеомагнитофона.

Рисунок 3.
Подтормаживающий механизм.
Центровка бобины.
Малые габариты станка и расположение в непосредственной близости, наматываемой катушки и подающей бобины с проводом, потребовали ввести дополнительный механизм центровки подающей бобины.


Рисунок 4, 5.
Центрирующий механизм.
При намотке катушки, провод с бобины воздействует на шторку «5», выполненной виде “вилки” и шаговый двигатель «3», через редуктор с делением 6 и зубчатый ремень, по роликовым направляющим «4», автоматически сдвигает бобину в нужном направлении.
Таким образом, провод всегда находится по центру см. рис 4, рис 5:

Рисунок 6.
Датчики, вид сзади.
Состав и устройство датчиков.
19. Оптические датчики механизма центровки бобины.
5. Шторка перекрывающая датчики механизма центровки бобины.
20. Шторки перекрывающие датчики переключения направления позиционера.
21. Оптические датчики переключения направления позиционера.
Позиционер.
Шторками «20» рис. 6 - выставляется граница намотки. Шаговый двигатель, перемещает механизм укладчика, пока шторка не перекроет один из датчиков «21» рис. 6, после чего меняется направление укладки.
В любой момент можно изменить направление укладки кнопками «1» рис. 7.

Рисунок 7.
Укладчик.
Скорость вращения шагового двигателя «9» рис. 7, синхронизирована с помощью датчика «10», «11» рис 8, с вращением наматываемой катушки и зависит от диаметра провода установленного в меню. Диаметр провода, может быть выставлен 0.02 - 0.4мм. С помощью ручки «8» рис. 7, можно передвинуть весь позиционер в сторону, не изменяя границы намотки. Таким образом, можно намотать другую секцию в многосекционных каркасах.

Рисунок 8.
Оптодатчик.
Состав позиционера и оптодатчика (рис. 7-8).
1. Кнопки ручного переключения направления укладки.
2. Светодиоды направления укладки.
3. Шторки перекрывающие датчики переключения направления позиционера.
4. Линейный подшипник.
5. Капролоновая гайка.
6. Ведущий винт. Диаметр 8мм, шаг резьбы 1,25мм.
7. Шариковые мебельные направляющие.
8. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
9. Шаговый двигатель.
10. Оптический датчик синхронизации.
11. Диск, перекрывающий датчик синхронизации. 18 прорезей.
Приёмный узел.

Рисунок 9.
Приёмный узел.


Рисунок 10, 11.
Приёмный узел.
1. Счётчик витков.
2. Коллекторный высокоскоростной двигатель.
3. Шестерня редуктора.
4. Кнопка «сброс счётчика».
5. Регулировка скорости.
6. Включатель «Старт намотки».
7. Крепёж наматываемой катушки.
Вращение наматываемой катушки, производит коллекторный высокооборотный двигатель через редуктор.
Редуктор состоит из трёх шестерён с общим делением 18. Это обеспечивает необходимый вращающий момент на малых оборотах.
Регулировка скорости двигателя, производится изменением питающего напряжения.

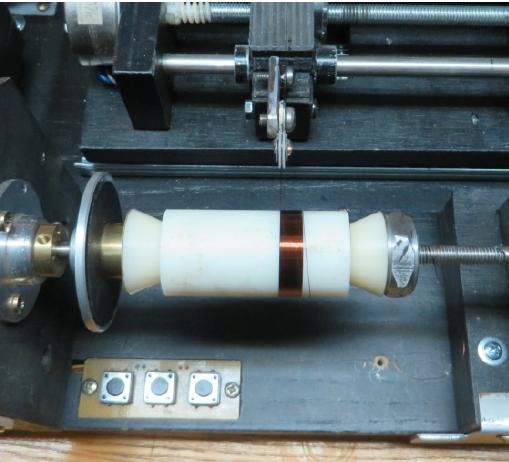
Рисунок 12, 13.
Крепление каркаса имеющего отверстие.
Конструкция приёмного узла позволяет закреплять, как каркасы имеющие центральное отверстие, так и каркасы, таких отверстий не имеющие, что хорошо видно на рисунках.


Рисунок 14, 15.
Крепление каркаса не имеющего отверстие.
Электрическая схема.

Рисунок 16.
Электрическая схема намоточного станка.
Всеми процессами станка, управляет микроконтроллер PIC16F877.
Индикация количества витков и диаметра провода, отображается на светодиодном четырёх знаковом индикаторе. При нажатой кнопке «D», отображается диаметр провода, при отжатой количество витков.
Для изменения диаметра провода, нажать кнопку «D» и кнопками «+», «-» изменить значение. Установленное значение автоматически сохраняется в EEPROM. Кнопка «Zerro» - обнуление счётчика. Разъём «ISCP» служит для программирования микроконтроллера.
P.S. Чертежей механической части не существует, потому что устройство изготовлялось в одном экземпляре, и конструкция формировалась в процессе сборки.
В данной конструкции были использованы имеющиеся в разборке элементы и узлы (не имеющие маркировки) от видеомагнитофонов и принтеров.
Ни в коем случае я не настаиваю в точном повторении данной конструкции, а лишь как в использовании каких-либо узлов от неё в своих конструкциях.
Повторение данного устройства возможно опытными радиолюбителями, имеющие навыки работы с механикой и способными изменить конструкцию под свои, имеющиеся механические части.
Механическая часть соответственно, может быть реализована по другому.
Редукторы на двигателях, могут быть и с другим делением.
Критические элементы:
Чтобы программа работала правильно, необходимо соблюсти ряд условий, а именно;
Оптический датчик «17» рис 1. , может быть другой конструкции, но обязательно на 18 отверстий.
Винт позиционера, обязательно с шагом 1,25мм - это стандартный шаг для винта диаметром 8мм.
Шаговый двигатель позиционера 48 шагов/оборот, 7.5 градусов/шаг - это самые распространённые двигатели в оргтехнике.
Демонстрационный ролик работы станка:
Ниже в прикреплении (в архиве) собраны все необходимые файлы и материалы для сборки намоточного станка.
Если по сборке и наладке у кого-то возникнут какие либо вопросы, то задавайте их на форуме. По возможности постараюсь ответить и помочь.
Желаю всем удачи в творчестве и всего наилучшего!
Архив "Намоточный станок"."
И не о чём не помышлял, пока не попалось мне на глаза какое-то незамысловатое счётное устройство. То, что оно должно быть приспособлено для подсчёта количества наматываемых витков провода на катушки трансформаторов - сомнению не подлежало, ибо нет наслаждения выше, чем делая одно, думать о другом. А разве находясь в состоянии полного сосредоточения (сродни трансу
) и при этом бубня отсчёт витков, это возможно? А приспособить не сложно. Также как и найти такую же штукенцию или ей подобную. Различных счётчиков сейчас уйма, а подойдёт даже неисправный. Тем более, что в начале его нужно аккуратно, запоминая взаимное расположение деталей (а лучше всё это сфотографировать) «распотрошить» и выкинуть всё лишнее.
Итак, из внутреннего содержимого оставляем цифровые колёса, зубчатые шестерни, оси для их посадки и стойки-держатели осей которые собираем «по месту» (так, как они и стояли до разборки). Оси в левую стойку желательно вклеить. На цифровых колёсах, рядом с центральным отверстием есть ещё одно – сборочное, им колесо надевается на шпильку (ровную и упругую проволочку, которая убирается перед установкой колпака). Без этой помощницы ничего не выйдет. При этом перед креплением второй стойки не забываем надеть на ведущее колесо резиновый пассик (лучше плоский) подходящей длины.

В донной части и в колпаке, по центру, делаем сквозные отверстия (например диаметром 3мм) для дальнейшего их скрепления винтом с гайкой. Это обязательно, ибо в процессе эксплуатации будут присутствовать сотрясения конструкции, при которых всё нами собранное будет постоянно разваливаться (проверено). Также в колпаке делается пропил шириной чуть менее (чтоб не слетал пассик) ведущего цифрового колеса и длиной через весь колпак. Не лишними будут ещё одно – два отверстия в боковой стенке колпака, они пригодятся при его установке на место, ибо при этом нужно попасть верхними шлицами на стойках в соответствующие пазы (кстати, левый и правый разные размером – не путать) внутри колпака. Вот через них отвёрточкой и направлять. В донной части нужно предусмотреть пару отверстий для крепления винтами или шурупами всей, уже собранной конструкции к намоточному устройству.

Как и в каком месте крепить, собранный счётчик к намоточному устройству – полная свобода творчества. А вот их рабочее соединение - вот такое:

На ведущий вал намоточного устройства устанавливается шкив (это в идеале) или втулка из мягкой пластмассы с внутренним диаметром чуть менее 6 мм (чтобы одевались внатяг) и наружным диаметром при котором один поворот ведущего вала будет соответствовать одному повороту ведущего цифрового колеса счётчика. Самый простой вариант – на подходящую полихлорвиниловую или толстую пластмассовую трубку длиной 10 мм наматывается достаточной толщиной (ну скажем до диаметра 20 мм) узкий скотч (можно изоленту, но хуже) и начинаем настройку, при необходимости отматывая или подматывая скотч до оптимальной толщины.

Короче, добиваемся соотношения передаточного числа ОДИН к ОДНОМУ . Особо не упорствуя, получилось сделать погрешность в +1 виток на 150 оборотов вала намоточного устройства. Ну а известная погрешность полностью исключает неудовлетворительный итог работы. Теперь во время работы можно мечтать, петь песни и, при необходимости, достойно отражать нападки прочих членов семьи. С пожеланием успеха, Babay .
Обсудить статью СЧЁТЧИК ВИТКОВ
Случилось так, что припекло мне трансформатор мотать, всё бы хорошо, да станка только не хватает - от тут и началось! Поиск по интернетам дал некоторые возможные варианты станко-построения, но смущало меня то, что подсчёт витков производится опять же механическим счётчиком, добытым из спидометра или старого магнитофона, а также герконы с калькуляторами. Хм …. На механику, в плане счётчика, у меня не стояло абсолютно, спидометров на разборку у меня нет, лишних калькуляторов тоже. Да и как сказал тов. Serega с РадиоКота : «Хорошие электронщики, зачастую - плохие механики !». Может я и не лучший электронщик - но механик уж точно паршивый.
Посему решил я сварганить электронный счётчик, а всю механическую часть устройства поручить на разработку семейству (благо отец и брат у меня как раз таки асы по части механики).
Прикинув одно место к другому, решил, что 4 разрядов индикаторов мне хватит с головой - это ж не много - не мало, а 10 000 витков. Управлять всем безобразием будет контроллер, вот только любимые ATtiny2313 и ATmega8 мне показалось совершенно не комильфо пихать в такое плевое устройство, задача простая и решать её нужно просто. Поэтому будем пользовать ATtiny13 - наверное, самый «дохлый» МК из тех, что есть в продаже на сегодняшний момент (я не беру PIC-и или MCS-51 - эти я только запрограммировать смогу, а вот программы для них писать не умею). Ног у этой тиньки маловато, ну дык никто не мешает нам сдвиговые регистры к ней прикрутить! В качестве датчика оборотов решил использовать датчик холла.
Набросал схему:
О кнопках сразу не сказал - а куда ж без них! Целых 4 штуки помимо ресета (S1).
S2 - включает режим намотки (режим установлен по умолчанию) - с каждым оборотом оси с катушкой будет увеличивать значение количества витков на 1
S3 - режим смотки, соответственно, с каждым оборотом, будет уменьшать значение на 1. Максимально смотать можно до «0» - в минус сматываться не будет:)
S4 - чтение сохраненной в EEPROM информации.
S5 - запись в EEPROM текущего значения + режим.
Естественно нужно не забывать нажать на кнопку смотки если собираемся сматывать витки, иначе они будут приплюсовываться. Можно было повесить вместо 1 датчика холла - 3 штуки или валкодер и изменить программу контроллера таким образом чтоб он сам выбирал направление вращения, но думаю в данном случае это лишнее.
Теперь не много по схеме:
Как видим, ничего сверхъестественного в ней нет. Питается всё это безобразие от 5В., ток потребляет что-то в районе 85мА.
С датчика холла TLE4905L (можно попробовать и другой воткнуть, я выбирал по принципу «что подешевле и есть в наличии») сигнал поступает на контроллер, генерируется прерывание и изменяется текущее значение, в зависимости от выбранного режима. Контроллер отсылает информацию на сдвиговые регистры, с которых она, в свою очередь, отправляется на семисегментные индикаторы либо на клавиатуру. Семисегментники применял с общим катодом, у меня был сразу квартет в одном корпусе, но желающим никто не мешает прикрутить 2 сдвоенных или 4 одиночных соединив параллельно аноды. Точка на индикаторах не используется, соответственно вывод H (dp) висит в воздухе. Работают индикаторы в динамическом режиме, поэтому сопротивления в R3-R9 номиналом меньше расчётных. На транзисторах VT1-VT4 собраны драйверы для индикаторов. Можно было применить и специализированные микросхемы типа ULN2803, но решил на транзисторах, по той простой причине, что у меня их скопилось - «как грязи», некоторым из них лет больше чем мне.
Кнопки S2-S4 - а-ля матричная клавиатура. «Выходы» кнопок висят на тех же проводниках что и входы регистров, дело в том что после пересылки данных из контроллера в регистры на входах SHcp и Ds может быть сигнал любого уровня, и на содержимое регистров это никак не повлияет. «Входы» кнопок висят на выходах регистров, передача информации происходит примерно следующим образом: сначала контроллер отправляет информацию на регистры для последующей пересылки на индикаторы, затем отправляет информацию для сканирования кнопок. Резисторы R14-R15 необходимы для предотвращения «драки» между ногами регистров/контроллера. Пересылка инфы на индикацию и на сканирование клавы происходит на большой частоте (внутренний генератор в тини13 настроен на 9,6МГц), соответственно как быстро мы не пытались бы нажать и отпустить кнопку, за время нажатия произойдет много срабатываний и соответственно нолик с кнопки побежит на встречу единичке с контроллера. Ну и такая неприятная вещь как дребезг контактов кнопок опять же.
Резисторами R16-R17 подтягиваем нашу клавиатуру к + питания, чтоб во время простоя с выходов клавиатуры на входы контроллера приходила единичка а не Z состояние влекущее ложные срабатывания. Можно было обойтись и без этих резисторов, внутренних pull-up резисторов в МК вполне достаточно, ну да рука у меня не поднялась их убрать - береженного бог бережет.
По схеме вроде бы и все, для заинтересовавшихся привожу список компонентов. Сразу оговорюсь, что номиналы могут отличаться в ту или иную сторону.
IC1 - микроконтроллер ATtiny13, можно применить с литерой V. Распиновка для варианта в SOIC-е такая же как на схеме. Если у кого то возникнет желание применить в корпусе QFN/MLF - тому даташит в руки.
IC2-IC3 - 8-ми разрядные сдвиговые регистры с защелкой на выходе - 74HC595, на макете я использовал в корпусах DIP на плате в готовом устройстве в SOIC-е. Распиновка одинаковая.
IC4 - цифровой однополярный датчик холла TLE4905L. Обвязка по даташиту R2 - 1k2, C2-C3 по 4n7. При установке датчика на станок проверить на какую сторону магнита он реагирует.
C1, C4 и C5 - конденсаторы фильтрующие питание, я ставил по 100n, должны быть установлены, как можно ближе к питающим выводам микросхем.
R1 - резистором подтягиваем ногу ресет к питанию, 300Ом - и далее. Я ставил 1k.
R3-R9 - токоограничительные резисторы для индикаторов. 33 Ом - 100 Ом, чем больше сопротивление, тем соответственно тусклее будут светить.
R10-R13 - ограничивают ток в цепях баз транзисторов. На макете стояли по 510 Ом, в плату вкрутил по 430 Ом.
VT1-VT4 - КТ315 с любыми буквенными индексами, можно заменить на КТ3102, КТ503 и аналоги.
R14-R15 как писалось выше для предотвращения «драки», думаю можно поставить от 1k и выше, но не задирать выше 4k7. При R16-R17 равных 300 Ом, суммарное сопротивление последовательно соединенных резисторов, не должно превышать 5k, в ходе моих экспериментов с повышением сопротивления выше 5k появлялись ложные срабатывания кнопок.
После проверки работы счётчика на макете, настала пора собрать железку в «законченное устройство».
Плату разводил в SL, причем развел скорее всего не оптимально - подгонял под имеющиеся детали, лень мне было на рынок ехать покупать другие. В общем развел, напечатал на прозрачной односторонней пленке Lomond для черно-белых лазерных принтеров. Печатал в негативе, в 2х экземплярах. Негатив - потому как собирался ПП делать с помощью пленочного фоторезиста, а он в свою очередь NEGATIVE. А в 2х экземплярах - чтоб при совмещении получился максимально непрозрачный слой тонера. Нет у меня желания ещё и балон с аэрозолем TRANSPARENT
21
покупать.
Совмещаем фотошаблоны, выставляя "на просвет", чтоб идеально совместились отверстия закрепляем обычным степлером - к этой процедуре нужно подойти ответственно, от неё во многом зависит качество будущей платы.
Теперь надо подготовить фольгированный текстолит. Кто-то трет его мелкой шкуркой, кто-то ластиком, а я, в последнее время, предпочитаю следующие варианты:
1. Если медь не шибко засрата окислами, достаточно её протереть тампоном смоченым в нашатырном спирте - ох и вонючая херня доложу я Вам, не нравится мне это занятие, но зато шустро. Идеально медь блистеть после этого не будет, но окислы спирт смоет и плата протравится.
2. Если же медь загажена порядочно, я её полирую войлочным кругом. Вешаю его на дрель и вуаля. Особо тут усердствовать не надо, пасту ГОИ я не применяю, для последующей протравки достаточно только войлочного круга. Быстро и эффективно.
В общем подготовили - фото выложить не могу, блистит зараза как зеркало и ничего не видно на фотке, фотограф из меня тож паршивый.
Ну да ладно, далее будем накатывать фоторезист.
Надо признать что фоторезист у меня уже вышел и срока годности и к плате собака липнуть отказывается, поэтому приходится предварительно плату греть. Я грею феном, но можно и утюгом. Хорошо бы конечно для этих целей ламинатор иметь, но:
- бабла мне на него теперь жалко
- когда бабла было не жалко было тупо лень:)
На горячую плату накатываем фоторезист, не забыв снять защитную пленку. Стараемся это делать максимально аккуратно, чтоб между платой и фоторезистом небыло воздушных пузырей. Бороться с ними потом - отдельная жопа. Если же пузыри все-таки появились, прокалываю их иглой.
Накатывать можно при любом освещении и не заниматься хернёй вспоминая любителей-фотографов, главное в нашем деле отсутствие солнечных лучей и других источников ультрафиолета.
После накатки, прогреваю плату горячим утюгом через газету, этим лечятся проколотые пузыри, ну и фоторезист прилипает намертво.
Далее накладываем шаблон на плату, здесь плата двухсторонняя, потому шаблон будет с обеих сторон платы. Кладём этот "бутерброд" на лист оргстекла и прижимаем воторым листом сверху. 2 листа нужны для того, чтоб после засветки одной стороны, можно было аккуратно перевернуть плату не сдвинув фотошаблон.
Засвечиваем с другой стороны. Я пользуюсь вот такой лампой:
Засвечиваю с растояния где-то 150мм в течении 7 минут (расстояние и время подбираются экспериментально).
Далее готовим слабый щелочной раствор - чайная ложка кальцинированной соды на пол литра воды. Температура воды - не принципиальна. Размешиваем чтоб растворилась вся сода. Для рук этот раствор не опасен, на ощупь как мыльная вода получается.
Снимаем с нашей платы защитную пленку и кидаем в раствор, после чего активно кисточкой начинаем тереть - но особо не нажимаем, чтоб не посдирать дорожки. Можно конечно и не тереть, но тогда есть вариант смываться фоторезист будет:
- долго
- смоется всё
а нам не то не другое не подходит, посему трем.
получаем что-то похожее:
Промываем плату водой, раствор не выливаем - он нам ещё пригодится. Если в процессе проявки платы какие-то дорожки всёж отслоились либо воздушные пузыри дорожки подпортили, необходимо эти места подретушировать цапонлаком либо специальным маркером. Далее травим плату. Я пользую хлорное железо.
После травления опять промываем плату водой и кидаем обратно в щелочной раствор, чтоб смыть более не нужный фоторезист. Часика хватает.
Далее лудим. Для маленьких плат или шибко ювелирных пользуюсь сплавом Розе, для таки вот плат - тупо паяльником с плоским жалом размазываю олово по плате. Плату в этом случае имеет мысл покрыть флюсом, я пользуюсь обычным спирто-канифольным.
Кому-то может показаться что дорожки вышли не шибко ровными - дорожки вышли ровными:) это издержки метода лужения паяльником, олово не равномерно ложится.
В законченом варианте кнопка сброса отсутствует - ну некуда мне ее было на плате втыкать, итак места мало, а если зависнет МК, значит обесточу и заново включу. Так же появился диод в цепи питания - защита от переполюсовки. Что касается остальных деталек - то использовал только те, что были под рукой, поэтому тут и SMD и обычные корпуса.
На неподвижной части станка крепим датчик, на ось вращения устаналиваем магнит таким образом, чтоб он при вращении проходил в 3-5 мм от датчика. Ну и пользуемся:)
Теперь точно всё, всем спасибо за внимание, а товарищам GP1 и Avreal за помощь в разработке.
Для всех радиолюбителей, либо энтузиастов увлекающихся звуковоспроизводящей аппаратурой, намоточный станок является крайне востребованным оборудованием. Такие устройства используются для намотки однослойных и многослойных катушек цилиндрического типа для трансформаторов.
В данной статье мы изучим устройство и принцип работы намоточного станка, а также рассмотрим пошаговую инструкцию, следуя которой вы сможете сделать такое оборудование своими руками.
1 Конструкция и принцип работы
Намоточный станок незаменим при производстве однотипных изделий. Существует два вида таких агрегатов — автоматические и ручные, при этом последние в промышленной сфере практически не распространены из-за ограниченной функциональности.
Однако габаритные размеры, большой вес и стоимость автоматических намотчиков делают их неприменимыми в быту, поэтому для дома лучше обзавестись ручным станком. Стандартная конструкция такого устройства состоит из следующих элементов:
- несущий каркас из двух вертикальных стоек из металла либо дерева, между которыми зафиксированы горизонтальные оси (на центральной стойке — для пластин с колесиком, на внешней — для самой катушки);
- большая и малая шестерни, передающие на катушку крутящий момент;
- ручка, зафиксированная на большой шестерни, посредством которой вращается ось с катушкой;
- крепежные элементы — винты и гайки.
![]()
Принцип действия такого устройства предельно прост — вращение ручки приводит к намотке на вращающийся каркас проволоки либо кабеля, за равномерность намотки отвечает направляющая укладчика, которая перемещает проволоку в горизонтальной плоскости.
Контроль количества витком может выполняться как визуально, так и с помощью специальных счетчиков, простейшим из которых является обычный велосипедный одометр. В более продвинутых станках в качестве счетчика используется специальный магнитно-герконовый датчик.
1.1 Магазинные станки
Среди промышленных намоточных агрегатов повсеместной популярностью пользуется станок для намотки кабеля СРН-05М3. Данная модель была запущена в эксплуатацию еще во времена СССР, и с тех пор хорошо себя зарекомендовала благодаря высокой надежности и производительности. На вторичном рынке СРН-05М3 можно найти за 15-20 тыс. рублей.

СРН-05М3 выполнен в корпусе из чугуна, вес оборудования составляет 80 кг, габариты — 877*840*142 см. Станок позволяет наматывать однослойные, двухслойные и тороидальные катушки в режиме автоматической укладки. Минимальный диаметр кабеля — 0.05 мм, максимальный — 0.5 мм. Агрегат комплектуется однофазным электромотором типа УЛ-62, мощность которого составляет 0.18 кВт. Наибольшая скорость вращения при намотке — 5100 об/мин.

Для бытовой эксплуатации лучшим выбором будет ручной станок NZ-1 (Китай). Несмотря на страну происхождения NZ-1 является достаточно надежным и функциональным оборудованием. Агрегат предназначен для наматывания катушек диаметром до 150 мм, с максимальной шириной не более 100 мм. Коэффициент передаточного отношения составляет 1:08 в быстром режиме намотки и 1:0.1 в медленном. Максимальная скорость — не более 1000 об/мин.
NZ-1 укомплектован счетчиком витков механического типа. Корпус выполнен из металла, опорная станина — из чугуна. Станок оснащен шкивом, что позволяет подключаться к нему электродвигатель через ременную передачу и работать в автоматическом режиме. Стоимость такого оборудования варьируется в пределах 4-5 тыс. рублей.
1.2 Самодельный намоточный станок (видео)
2 Делаем станок для намотки своими руками
Представленный в данном разделе статьи станок для намотки кабеля позволяет работать с катушками на квадратном, круглом и прямоугольном каркасе с диагональю до 200 мм, его можно будет комплектовать разными шкивами, что позволит менять шаг намотки в пределах 0.3-3.2 мм.

Приведенная схема демонстрирует каркас станка. Для сборки станины используются металлические листы толщиной 15 мм (для основания) и 5 мм (для боковых участков). Экономия на толщине металла не приветствуется, так как она ведет к уменьшению веса агрегата и, как следствие, ухудшению его устойчивости.
Вам потребуется вырезать заготовки станины (размеры соблюдаются) и просверлить в них два сквозных отверстия, затем боковушки привариваются к пластине основания. В нижнее отверстие нужно смонтировать 2 подшипника, в верхнее — втулки под вал вращения.

В качестве вала можно использовать пруток гладкой арматуры 12 мм, которую предварительно нужно отшлифовать и покрасить. Для втулки укладчика можно брать пруток диаметром 10 мм, по всей длине которого нарезается резьба стандарта М12*1,0.

Шкивы лучше вытачивать тройные, однако учитывайте, что их совокупная толщина не должна превышать 20 мм. При большей толщине потребуется дополнительно увеличивать длину валов на аналогичный размер. Указанная в схеме комбинация шкивов позволяет применять 54 разных шага намотки. Если вам необходимо работать с проводами диаметром менее 0.31 мм, потребуется дополнительный шкив 12/16/20 мм, с ним вы сможете наматывать провода 0.15 мм.

Для сооружения ручного привода вам потребуется крупноразмерная шестерня и рукоять, которые фиксируются посредством цангового зажима на верхнем валу. Благодаря использованию цанги вы сможете при необходимости прервать намотку фиксировать ручку, тем самым препятствуя разматыванию катушки.
Счетчик витков для намоточного станка делается из обычного калькулятора. Также вам потребуется магнит с герконовым датчиком (можно купить в любом магазине радиотехники), выводы которых необходимо присоединить к контактам калькулятора на кнопке «=».
2.1 Как работать на самодельном станке?
И так, оборудование готово, как же на нем работать? Чтобы установить каркас для намотки необходимо выдвинуть из посадочного гнезда верхний вал на длину, равную длине оправы. Далее на вал монтируется правый диск и оправка катушки, поверх которой надевается сама катушка. На следующем этапе устанавливается левый диск и навинчивается гайка, после чего все устанавливается в первоначальную позицию.

В отверстие на верхнем валу размещается гвоздик и производится центровка оправы, после которой каркас зажимается гайкой. Дальнейшие операции выполняются в следующей последовательности:
- На подающем валу размещается подходящей по диаметру шкив.
- Посредством вращения шкива укладчик перемещается в крайнее положение, к одной из сторон катушки.
- На шкив одевается пассик провода — кольцом либо восьмеркой. Конец провода необходимо продеть под средним валом, размесить в желобе укладчика и зафиксировать на каркасе. Натяжение провода регулируется посредством зажимов на укладчике.
- В начале намотки на калькуляторе набирается комбинация «1+1», после чего производится вращение ручки. С каждым полным оборотом вала калькулятор самостоятельно будет увеличивать число на экране на единицу, тем самым считая количество витков провода.
Поскольку данное оборудование имеет предельно простое устройство, в котором отсутствует какой-либо контроллер управления намоточным станком, в процессе работы вам потребуется постоянно следить за катушкой и при необходимости поправлять кабель на каркасе вручную.

Если вы хотите сделать станок более функциональным, потребуется усложнить конструкцию добавив в нее контроллер. Это позволит автоматизировать рабочий процесс, однако для полностью механической укладки в пару к контроллеру необходимо установить шаговый двигатель (подойдет обычный 24-вольтовый привод, работающий в режиме 44-60 шагов на оборот). Силовые транзисторы к данному комплекту подбираются исходя из характеристик мотора. В качестве контроллера оптимально подойдет прибор АТмега8, купить который можно за 150-200 рублей.