მაგრამ თქვენ შეგიძლიათ ააწყოთ მრიცხველი მხოლოდ ერთ ჩიპზე - უნივერსალური პროგრამირებადი მიკროკონტროლერი, რომელიც მოიცავს სხვადასხვა პერიფერიულ მოწყობილობას და შეუძლია გადაჭრას პრობლემების ძალიან ფართო სპექტრი. ბევრ მიკროკონტროლერს აქვს სპეციალური მეხსიერების არეალი - EEPROM. მასში ჩაწერილი მონაცემები (მათ შორის პროგრამის შესრულების დროს), მაგალითად, მიმდინარე დათვლის შედეგი, ინახება დენის გამორთვის შემდეგაც.
შემოთავაზებული მრიცხველი იყენებს Attiny2313 მიკროკონტროლერს AVR ოჯახიდან Almel-ისგან. მოწყობილობა ახორციელებს საპირისპირო დათვლას, აჩვენებს შედეგს უმნიშვნელოს გაუქმებით
hive to ოთხი ბიტიანი LED მაჩვენებელი, ინახავს შედეგს EEPROM-ში, როდესაც დენი გამორთულია. მიკროკონტროლერში ჩაშენებული ანალოგური შესადარებელი გამოიყენება მიწოდების ძაბვის შემცირების დროულად გამოსავლენად. მრიცხველი ახსოვს დათვლის შედეგს დენის გამორთვისას, აღადგენს მას ჩართვისას და, მექანიკური მრიცხველის მსგავსად, აღჭურვილია გადატვირთვის ღილაკით.
მრიცხველის წრე ნაჩვენებია სურათზე. B პორტის ექვსი ხაზი (РВ2-РВ7) და პორტის D ხუთი ხაზი (PDO, PD1, PD4-PD6) გამოიყენება LED ინდიკატორ HL1-ზე დათვლის შედეგის დინამიური აღნიშვნის ორგანიზებისთვის. ფოტოტრანზისტორების VT1 და VT2 კოლექტორის დატვირთვები არის რეზისტორები, რომლებიც ჩაშენებულია მიკროკონტროლერში და ჩართულია პროგრამული უზრუნველყოფის საშუალებით, რომელიც აკავშირებს მიკროკონტროლერის შესაბამის ქინძისთავებს მის ელექტრომომარაგების წრეს.
დათვლის შედეგის N-ით ზრდა ხდება იმ მომენტში, როდესაც ოპტიკური კავშირი ასხივებს VD1 დიოდსა და ფოტოტრანსისტორ VT1-ს შორის შეწყვეტილია, რაც ქმნის მზარდი დონის განსხვავებას მიკროკონტროლერის INT0 შეყვანაში. ამ შემთხვევაში, დონე INT1 შეყვანაზე უნდა იყოს დაბალი, ანუ ფოტოტრანზისტორი VT2 უნდა იყოს განათებული ემიტირებული დიოდით VD2. დიფერენციალური მატების მომენტში INT1 შეყვანისას და დაბალი დონის INT0 შეყვანისას, შედეგი შემცირდება ერთით. დონეების სხვა კომბინაციები და მათი განსხვავებები INT0 და INT1 შეყვანებში არ ცვლის დათვლის შედეგს.
მიღწევისთანავე მაქსიმალური ღირებულება 9999 ათვლა გრძელდება ნულიდან. ნულოვანი მნიშვნელობიდან ერთის გამოკლებით მივიღებთ შედეგს 9999. თუ უკუსვლა არ არის საჭირო, შეგიძლიათ გამორიცხოთ გამოსხივების დიოდი VD2 და ფოტოტრანზისტორი VT2 მრიცხველიდან და დაუკავშიროთ მიკროკონტროლერის INT1 შეყვანა საერთო სადენს. რაოდენობა მხოლოდ გაიზრდება.
როგორც უკვე აღვნიშნეთ, მიწოდების ძაბვის შემცირების დეტექტორი არის მიკროკონტროლერში ჩაშენებული ანალოგური შედარებითი. იგი ადარებს არასტაბილიზებულ ძაბვას რექტფიკატორის გამოსავალზე (დიოდური ხიდი VD3) სტაბილიზებულ ძაბვას ინტეგრირებული სტაბილიზატორის DA1 გამოსავალთან. პროგრამა ციკლურად ამოწმებს შედარების მდგომარეობას. მრიცხველის ქსელიდან გათიშვის შემდეგ, ძაბვა მცირდება გამომსწორებლის ფილტრის კონდენსატორზე C1 და სტაბილიზირებული ძაბვა გარკვეული დროის განმავლობაში უცვლელი რჩება. რეზისტორები R2-R4 შეირჩევა შემდეგნაირად. რომ ამ სიტუაციაში შედარების მდგომარეობა საპირისპიროა. ამის აღმოჩენის შემდეგ, პროგრამა ახერხებს დაწეროს მიმდინარე დათვლის შედეგი მიკროკონტროლერის EEPROM-ზე, სანამ ის შეწყვეტს ფუნქციონირებას დენის გამორთვის გამო. შემდეგ ჯერზე, როცა ჩართავთ, პროგრამა წაიკითხავს EERROM-ში დაწერილ რიცხვს და აჩვენებს მას ინდიკატორზე. დათვლა გაგრძელდება ამ მნიშვნელობიდან.
მიკროკონტროლერის ქინძისთავების შეზღუდული რაოდენობის გამო, SB1 ღილაკის დასაკავშირებლად, რომელიც აღადგენს მრიცხველს, გამოყენებული იქნა პინი 13, რომელიც ემსახურება როგორც შედარების ანალოგური შეყვანა (AIM) და ამავე დროს, როგორც "ციფრული" შეყვანა. PB1. ძაბვის გამყოფი (რეზისტორები R4, R5) აქ ადგენს მიკროკონტროლერის მიერ აღქმულ დონეს, როგორც მაღალ ლოგიკურს, როდესაც დააჭირეთ SB1 ღილაკს, ის გახდება დაბალი. ეს არ იმოქმედებს შედარების მდგომარეობაზე, რადგან ძაბვა AIN0 შეყვანაზე ჯერ კიდევ უფრო მეტია ვიდრე AIN1-ზე.
SB1 ღილაკზე დაჭერისას პროგრამა აჩვენებს მინუს ნიშანს ინდიკატორის ყველა ციფრზე და მისი გაშვების შემდეგ იწყებს ათვლას ნულიდან. თუ ღილაკზე დაჭერისას გამორთავთ მრიცხველს, მიმდინარე შედეგი არ ჩაიწერება EEPROM-ზე და იქ შენახული მნიშვნელობა იგივე დარჩება.
პროგრამა შექმნილია ისე, რომ მისი ადვილად ადაპტირება შესაძლებელია მრიცხველზე სხვა ინდიკატორებთან (მაგალითად, საერთო კათოდებით), სხვადასხვა გაყვანილობის საშუალებით. ბეჭდური მიკროსქემის დაფადა ა.შ. პროგრამის მცირე კორექტირება ასევე საჭირო იქნება კვარცის რეზონატორის გამოყენებისას 1 MHz-ზე მეტით განსხვავებული სიხშირით მითითებული სიხშირისგან.
როდესაც წყაროს ძაბვა არის 15 ვ, გაზომეთ ძაბვა მიკროკონტროლერის პანელის 12 და 13 ქინძისთავებზე საერთო მავთულთან შედარებით (პინი 10). პირველი უნდა იყოს 4...4,5 ვ დიაპაზონში, ხოლო მეორე 3,5 ვ-ზე მეტი, მაგრამ პირველზე ნაკლები. შემდეგი, წყაროს ძაბვა თანდათან მცირდება. როდესაც ის ეცემა 9... 10 ვ-მდე, ძაბვის მნიშვნელობების სხვაობა 12 და 13 ქინძისთავებში უნდა გახდეს ნული და შემდეგ შეიცვალოს ნიშანი.
ახლა თქვენ შეგიძლიათ დააინსტალიროთ დაპროგრამებული მიკროკონტროლერი პანელში, დააკავშიროთ ტრანსფორმატორი და დააყენოთ მასზე ქსელის ძაბვა. 1,5...2 წამის შემდეგ თქვენ უნდა დააჭიროთ SB1 ღილაკს. მრიცხველის ინდიკატორი აჩვენებს რიცხვს 0. თუ ინდიკატორზე არაფერია ნაჩვენები, კვლავ შეამოწმეთ ძაბვის მნიშვნელობები მიკროკონტროლერის AIN0.AIN1 შეყვანებზე. პირველი უნდა იყოს მეორეზე დიდი.


როდესაც მრიცხველი წარმატებით ამოქმედდა, რჩება მხოლოდ დათვლის სისწორის შემოწმება ფოტოტრანზისტორების მონაცვლეობით დაჩრდილვით IR სხივების მიმართ გაუმჭვირვალე ფირფიტით. ამისთვის უფრო დიდი კონტრასტიმიზანშეწონილია ინდიკატორების დაფარვა წითელი ორგანული მინის ფილტრით.

ასევე, თუ ვინმე აწყობს მრიცხველს Atiny2313-ზე კვარცის გარეშე,
ფუჟები ასე დავაპროგრამე
ASM წყარო
Firmware
სამოყვარულო რადიო პრაქტიკაში ხშირად ჩნდება ტრანსფორმატორების, ჩოკების, რელეების და ა.შ.
ამ აპარატის შემუშავებისას დაისვა შემდეგი ამოცანები:
1. მცირე ზომები.
2. გლუვი spindle დაწყება.
3. მთვლელი 10000 ბრუნამდე (9999).
4. გრაგნილი მავთულის ავტომატური გაყვანით. დასაყრდენი მოედანი (მავთულის დიამეტრი) 0.02 - 0.4 მმ.
5. სექციური გრაგნილების დახვევის შესაძლებლობა ხელახალი კონფიგურაციის გარეშე.
6. ცენტრალური ნახვრეტის გარეშე ჩარჩოების დამაგრებისა და დახვევის შესაძლებლობა.

სურათი 1.
გრაგნილი მანქანის გარე ხედი.
გრაგნილი მანქანის შემადგენლობა.
1. Feed reel (reel of wire).
2. დამუხრუჭება (მუხრუჭის მექანიზმი).
3. სტეპერ ძრავა ბობინის ცენტრირებისთვის.
4. ბურთის ავეჯის გიდები.
5. ბორბლის ცენტრირების მექანიზმის ოპტიკური სენსორების ჩამკეტი.
6. სექციური გრაგნილების დახვევისას პოზიციონერის სხვა მონაკვეთზე გადასატანი სახელური.
7. ღილაკები დაგების მიმართულების ხელით გადართვისთვის.
8. LED-ები განლაგების მიმართულებით.
9. პოზიციონერის სტეპერ ძრავა.
10. ოპტიკური გრაგნილი საზღვრის სენსორების ჟალუზები.
11. პოზიციონერის ხრახნი.
12. ბურთის ავეჯის გიდები.
13. გრაგნილი ბორბალი.
14. გრაგნილი ძრავა.
15. შემობრუნების მრიცხველი.
16. დაყენების ღილაკები.
17. ოპტიკური სინქრონიზაციის სენსორი.
18. სიჩქარის კონტროლერი.
მოწყობილობა და მუშაობის პრინციპი.
კვების ერთეული.
კვების ბლოკი შექმნილია მასზე სხვადასხვა ზომის მავთულის ბორბლის დასამაგრებლად და მავთულზე დაჭიმვის უზრუნველსაყოფად.
მასში შედის ბობინის დამაგრების მექანიზმი და ლილვის დამუხრუჭების მექანიზმი.

სურათი 2.
კვების ერთეული.
დამუხრუჭება.
კვების რგოლის დამუხრუჭების გარეშე, ჩარჩოებზე მავთულის გრაგნილი ფხვიერი იქნება და მაღალი ხარისხის გრაგნილი არ იმუშავებს. თექის ლენტი "2" ანელებს ბარაბანი "1". ბერკეტის „3“ შემობრუნება აძლიერებს ზამბარას „4“ - დამუხრუჭების ძალის რეგულირება. მავთულის სხვადასხვა სისქისთვის, საკუთარი დამუხრუჭება მორგებულია. აქ გამოყენებულია თაროზე არსებული VCR ნაწილები.

სურათი 3.
დამუხრუჭების მექანიზმი.
ბობინის ცენტრირება.
დანადგარის მცირე ზომები და ლოკაციის ბორბლის და მავთულის შესანახი რგოლის სიახლოვეს მდებარეობა მოითხოვდა დამატებითი მექანიზმის დანერგვას საკვების ბორბლის ცენტრირებისთვის.


სურათი 4, 5.
ცენტრირების მექანიზმი.
კოჭის დახვევისას, რგოლიდან მავთული მოქმედებს ფარდაზე "5", რომელიც დამზადებულია "ჩანგალის" სახით და ბიჯური ძრავი"3", გადაცემათა კოლოფით 6 განყოფილებით და დაკბილული ქამრით, როლიკებით "4"-ის გასწვრივ, ავტომატურად მოძრაობს ბობინს სასურველი მიმართულებით.
ამრიგად, მავთული ყოველთვის ცენტრშია, იხილეთ ნახ. 4, ნახ. 5:

სურათი 6.
სენსორები, უკანა ხედი.
სენსორების შემადგენლობა და დიზაინი.
19. ბობინის ცენტრირების მექანიზმის ოპტიკური სენსორები.
5. ფარდა, რომელიც ფარავს ბორბლის ცენტრირების მექანიზმის სენსორებს.
20. ფარდები, რომლებიც ფარავს პოზიციონერის მიმართულების გადართვის სენსორებს.
21. პოზიციონერის მიმართულების გადართვის ოპტიკური სენსორები.
პოზიციონერი.
ფარდები "20" ნახ. 6 - დაყენებულია გრაგნილის ლიმიტი. სტეპერ ძრავა ამოძრავებს სტეკერის მექანიზმს მანამ, სანამ ფარდა არ დაბლოკავს ერთ-ერთ სენსორს „21“ ნახ. 6, რის შემდეგაც იცვლება განლაგების მიმართულება.
თქვენ შეგიძლიათ შეცვალოთ განლაგების მიმართულება ნებისმიერ დროს ღილაკების "1" ნახ. 7.

სურათი 7.
სტეკერი.
სტეპერ ძრავის ბრუნვის სიჩქარე "9" ნახ. 7, სინქრონიზებულია სენსორის გამოყენებით "10", "11" ნახ. 8, ჭრილობის ხვეულის ბრუნვით და დამოკიდებულია მენიუში მითითებული მავთულის დიამეტრზე. მავთულის დიამეტრი შეიძლება დაყენდეს 0.02 - 0.4 მმ. ღილაკის გამოყენებით „8“ ნახ. 7, თქვენ შეგიძლიათ გადაიტანოთ მთელი პოზიციონერი გვერდით გრაგნილის საზღვრების შეცვლის გარეშე. ამ გზით შესაძლებელია კიდევ ერთი მონაკვეთის შემოხვევა მრავალსექციურ ჩარჩოებში.

Ფიგურა 8.
ოპტოსენსორი.
პოზიციონერისა და ოპტოსენსორის შემადგენლობა (სურ. 7-8).
1. ღილაკები დაგების მიმართულების ხელით გადართვისთვის.
2. LED-ები გაყვანის მიმართულებით.
3. ფარდები, რომლებიც ფარავს პოზიციონერის მიმართულების გადართვის სენსორებს.
4. ხაზოვანი საკისარი.
5. კაპროლონის კაკალი.
6. ტყვიის ხრახნი. დიამეტრი 8 მმ, ძაფის ნაბიჯი 1.25 მმ.
7. ბურთის ავეჯის გიდები.
8. სექციური გრაგნილების დახვევისას პოზიციონერის სხვა მონაკვეთზე გადასატანი სახელური.
9. სტეპერ ძრავა.
10. ოპტიკური დროის სენსორი.
11. დისკი, რომელიც ფარავს სინქრონიზაციის სენსორს. 18 სლოტი.
მიმღები კვანძი.

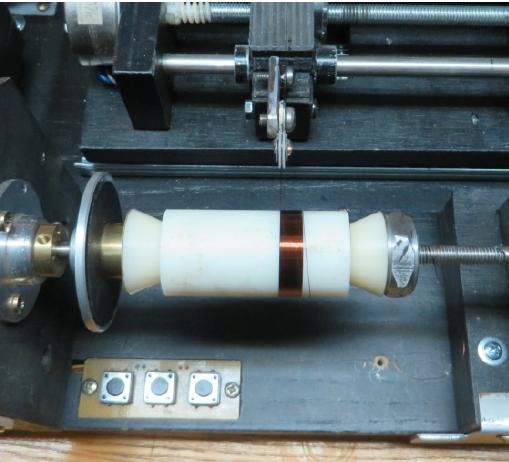
სურათი 9.
მიმღები კვანძი.


სურათი 10, 11.
მიმღები კვანძი.
1. შემობრუნების მრიცხველი.
2. კომუტატორი მაღალსიჩქარიანი ძრავა.
3. შემცირების მექანიზმი.
4. "მრიცხველის გადატვირთვის" ღილაკი.
5. სიჩქარის რეგულირება.
6. "დაწყების გრაგნილი" შეცვლა.
7. გრაგნილი ბორბლის დამაგრება.
ჭრილობის ხვეულის როტაცია წარმოებს მაღალსიჩქარიანი კომუტატორის ძრავით გადაცემათა კოლოფში.
გადაცემათა კოლოფი შედგება სამი გადაცემათა კოლოფისაგან, რომელთა საერთო სიმაღლეა 18. ეს უზრუნველყოფს აუცილებელ ბრუნვას დაბალ სიჩქარეზე.
ძრავის სიჩქარე რეგულირდება მიწოდების ძაბვის შეცვლით.

სურათი 12, 13.
ჩარჩოს დამაგრება ნახვრეტით.
მიმღები დანადგარის დიზაინი საშუალებას გაძლევთ დაამაგროთ ორივე ჩარჩო ცენტრალური ნახვრეტით და ჩარჩოები ასეთი ხვრელების გარეშე, რაც აშკარად ჩანს ფიგურებში.


სურათი 14, 15.
ჩარჩოს დამაგრება ხვრელის გარეშე.
ელექტრული დიაგრამა.

სურათი 16.
გრაგნილი მანქანის ელექტრული წრე.
აპარატის ყველა პროცესი კონტროლდება PIC16F877 მიკროკონტროლერით.
ოთხნიშნა LED ინდიკატორზე გამოსახულია მავთულის მობრუნების რაოდენობის და დიამეტრის მითითება. "D" ღილაკზე დაჭერისას ნაჩვენებია მავთულის დიამეტრი დაჭერისას, ნაჩვენებია მობრუნების რაოდენობა.
მავთულის დიამეტრის შესაცვლელად დააჭირეთ ღილაკს "D" და გამოიყენეთ "+", "-" ღილაკები მნიშვნელობის შესაცვლელად. მითითებული მნიშვნელობა ავტომატურად შეინახება EEPROM-ში. ღილაკი "ნულოვანი" - აღადგენს მრიცხველს. "ISCP" კონექტორი გამოიყენება მიკროკონტროლერის დასაპროგრამებლად.
P.S. არ არსებობს მექანიკური ნახატები, რადგან მოწყობილობა დამზადდა ერთ ეგზემპლარად, ხოლო დიზაინი ჩამოყალიბდა შეკრების პროცესში.
ამ დიზაინში გამოყენებული იყო დაშლილი ელემენტები და შეკრებები (არ არის მარკირებული) VCR–დან და პრინტერებიდან.
არავითარ შემთხვევაში არ მოვითხოვ ამ დიზაინის ზუსტ გამეორებას, არამედ მხოლოდ მისგან რაიმე კვანძის გამოყენებას ჩემს დიზაინში.
გამეორება ამ მოწყობილობისშესაძლოა გამოცდილი რადიომოყვარულების მიერ, რომლებსაც აქვთ მექანიკური უნარები და შეუძლიათ შეცვალონ დიზაინი, რათა მოერგოს მათ არსებულ მექანიკურ ნაწილებს.
მექანიკური ნაწილი, შესაბამისად, შეიძლება განსხვავებულად განხორციელდეს.
ძრავებზე გადაცემათა კოლოფებს შეიძლება ჰქონდეთ განსხვავებული განყოფილება.
კრიტიკული ელემენტები:
იმისათვის, რომ პროგრამამ სწორად იმუშაოს, უნდა დაკმაყოფილდეს მთელი რიგი პირობები, კერძოდ;
ოპტიკური სენსორი „17“ სურ. 1. შეიძლება იყოს განსხვავებული დიზაინის, მაგრამ უნდა ჰქონდეს 18 ხვრელი.
პოზიციონერის ხრახნი უნდა ჰქონდეს 1,25 მმ სიმაღლე - ეს არის სტანდარტული ნაბიჯი 8 მმ დიამეტრის ხრახნისთვის.
პოზიციონერის სტეპერ ძრავა 48 ნაბიჯი/რევოლუცია, 7,5 გრადუსი/საფეხური - ეს არის ყველაზე გავრცელებული ძრავები საოფისე აღჭურვილობაში.
აპარატის საჩვენებელი ვიდეო:
ქვემოთ დანართში (არქივში) თავმოყრილია ყველა საჭირო ფაილი და მასალა გრაგნილი მანქანის ასაწყობად.
თუ ვინმეს გაქვთ რაიმე შეკითხვა შეკრებასთან და დაყენებასთან დაკავშირებით, გთხოვთ, ჰკითხოთ მათ ფორუმზე. ვეცდები ვუპასუხო და დავეხმარო თუ შეიძლება.
ყველას გისურვებთ წარმატებებს თქვენს შემოქმედებაში და ყოველივე საუკეთესოს!
არქივი "მოხვეული მანქანა"
და არაფერზე არ მიფიქრია მანამ, სანამ რაღაც უბრალო მთვლელმა მოწყობილობამ არ მომიჭირა თვალი. ეჭვგარეშეა, რომ ის უნდა იყოს ადაპტირებული ტრანსფორმატორის ხვეულებზე მავთულის შემობრუნების რაოდენობის დასათვლელად, რადგან არ არსებობს უფრო დიდი სიამოვნება, ვიდრე სხვაზე ფიქრი ერთი საქმის კეთებისას. შესაძლებელია თუ არა სრული კონცენტრაციის მდგომარეობაში ყოფნა (მსგავსი ტრანსი) და ამავდროულად ტამბური მორიგეობას ითვლის, ეს შესაძლებელია? და ადაპტაცია არ არის რთული. ისევე როგორც ერთი და იგივე ნივთის ან რაიმე მსგავსის პოვნა. ახლა ბევრი სხვადასხვა მრიცხველია და გაუმართავიც კი გააკეთებს. უფრო მეტიც, დასაწყისში თქვენ უნდა ყურადღებით „გააწუროთ“ ის, დაიმახსოვროთ ნაწილების შედარებითი პოზიციები (ან კიდევ უკეთესი, გადაიღოთ ეს ყველაფერი) და გადააგდოთ ყველაფერი არასაჭირო.
ასე რომ, შიდა შიგთავსიდან ვტოვებთ ციფრულ ბორბლებს, მექანიზმებს, ღერძებს მათი დამონტაჟებისთვის და ღერძების დამჭერებისთვის, რომლებსაც ვაწყობთ „ადგილზე“ (როგორც ისინი იდგნენ დაშლის წინ). მიზანშეწონილია ღერძების წებო მარცხენა თაროში. ციფრულ ბორბლებზე, გვერდით ცენტრალური ხვრელიარის კიდევ ერთი - აწყობილი, რომლითაც ბორბალი იდება ქინძისთავზე (გლუვი და ელასტიური მავთული, რომელიც ამოღებულია თავსახურის დაყენებამდე). ამ ასისტენტის გარეშე არაფერი იმუშავებს. ამავდროულად, მეორე თაროს დამაგრებამდე არ დაგავიწყდეთ ამძრავ ბორბალზე შესაბამისი სიგრძის რეზინის ქამარი (სასურველია ბრტყელი).

ქვედა ნაწილში და თავსახურში, ცენტრში, ვაკეთებთ ხვრელებს (მაგალითად, 3 მმ დიამეტრის) შემდგომი დასამაგრებლად ხრახნით და თხილით. ეს აუცილებელია, რადგან ექსპლუატაციის დროს იქნება სტრუქტურის ვიბრაცია, რომლის დროსაც ყველაფერი, რაც ჩვენ ავაწყეთ, მუდმივად იშლება (შემოწმებულია). ასევე, კეთდება ჭრილი ქუდში ოდნავ ნაკლები სიგანით (ისე, რომ ქამარი არ გაფრინდეს) მამოძრავებელი ციფრული ბორბალი და სიგრძე მთელ თავსახურზე. ქუდის გვერდით კედელზე ერთი ან ორი ხვრელი ზედმეტი არ იქნება, ისინი გამოგადგებათ მის ადგილზე დაყენებისას, რადგან ამ შემთხვევაში თაროებზე ზედა ჭრილები შესაბამის ღარებში უნდა ჩადოთ (სხვათა შორის, მარცხენა და მარჯვენა სხვადასხვა ზომის– არ იყოს დაბნეული) თავსახურის შიგნით. გამოიყენეთ ხრახნიანი მათში გასატარებლად. ქვედა ნაწილში, თქვენ უნდა უზრუნველყოთ რამდენიმე ხვრელი, რომ დაამაგროთ მთელი უკვე აწყობილი სტრუქტურა გრაგნილ მოწყობილობაზე ხრახნებით ან ხრახნებით.

როგორ და სად დავამაგროთ აწყობილი მრიცხველი გრაგნილ მოწყობილობაზე - შემოქმედების სრული თავისუფლება. მაგრამ მათი სამუშაო კავშირი ასეთია:

ბორბალი (ეს იდეალურია) ან რბილი პლასტმასისგან დამზადებული ბუჩქი, რომლის შიდა დიამეტრი 6 მმ-ზე ოდნავ ნაკლებია (დაჭიმვის ქვეშ მორგება) და გარე დიამეტრით, რომლის დროსაც წამყვანი ლილვის ერთი ბრუნი შეესაბამება მრიცხველის ერთ შემობრუნებას. მამოძრავებელი ციფრული ბორბალი დამონტაჟებულია გრაგნილი მოწყობილობის წამყვანი ლილვზე. უმარტივესი ვარიანტია საკმარისი სისქის ვიწრო წებოვანი ლენტის შეფუთვა (ვთქვათ, 20 მმ დიამეტრამდე) შესაფერის პოლივინილ ქლორიდზე ან სქელ პლასტმასის მილზე 10 მმ სიგრძით (ვთქვათ, ელექტრო ლენტით, მაგრამ უარესი) და დაიწყოთ დაყენება. საჭიროების შემთხვევაში, ამოიღეთ ან გადაახვიეთ ლენტი ოპტიმალურ სისქემდე.

მოკლედ, ჩვენ ვაღწევთ გადაცემათა კოეფიციენტის თანაფარდობას ერთი ერთი. განსაკუთრებული დაჟინების გარეშე, მე მოვახერხე შეცდომის დაშვება +1 ბრუნის 150 ბრუნზე გრაგნილი მოწყობილობის ლილვის. კარგად, ცნობილი შეცდომა მთლიანად გამორიცხავს სამუშაოს არადამაკმაყოფილებელ შედეგს. ახლა, მუშაობისას, შეგიძლიათ იოცნებოთ, იმღეროთ სიმღერები და, საჭიროების შემთხვევაში, ადეკვატურად მოიგერიოთ ოჯახის სხვა წევრების თავდასხმები. წარმატებების სურვილებით, ბაბეი.
განიხილეთ სტატია TURN COUNTER
მოხდა ისე, რომ გამიჩნდა ტრანსფორმატორის გადახურვის სურვილი, ყველაფერი კარგად იქნებოდა, მაგრამ უბრალოდ არ მქონდა საკმარისი მანქანა - აი, საიდან დაიწყო ყველაფერი! ინტერნეტის ძიებამ გარკვეული შედეგი გამოიღო შესაძლო ვარიანტებიჩარხული კონსტრუქცია, მაგრამ რამ დამაბნია ის, რომ მოხვევების დათვლა ისევ ხდება სპიდომეტრიდან ან ძველი მაგნიტოფონიდან აღებული მექანიკური მრიცხველით, ასევე კალკულატორებით ლერწმის გადამრთველებით. ჰმ…. მექანიკა აბსოლუტურად არ მჭირდებოდა, მრიცხველის მხრივ არც სპიდომეტრი მაქვს დასაშლელი და არც ზედმეტი კალკულატორები მაქვს. დიახ, და როგორც ამხანაგმა თქვა. სერეგა RadioKat-დან: " კარგი ელექტრონული ინჟინრები, ხშირად ცუდი მექანიკა! მე შეიძლება არ ვიყო საუკეთესო ელექტრონიკის ინჟინერი, მაგრამ, რა თქმა უნდა, ცუდი მექანიკოსი ვარ.
ამიტომ, მე გადავწყვიტე დაბნეულობა ელექტრონული მრიცხველი, და აპარატის მთელი მექანიკური ნაწილის დამუშავება ანდეთ ოჯახს (საბედნიეროდ, მამაჩემი და ძმა მექანიკაში ტუზები არიან).
ერთი ადგილიდან მეორეზე შეფასებისას გადავწყვიტე, რომ ინდიკატორის 4 ციფრი საკმარისი იქნებოდა ჩემთვის - ეს არ არის ბევრი - არც თუ ისე ცოტა, არამედ 10,000 ბრუნი. მთელ არეულობას კონტროლერი გააკონტროლებს, მაგრამ მე მეჩვენებოდა, რომ ჩემი საყვარელი ATtiny2313 და ATmega8 აბსოლუტურად არ იყო საჭირო ასეთ უსარგებლო მოწყობილობაში ჩასმა, ამოცანა მარტივია და მისი მოგვარება უბრალოდ საჭიროა. ამიტომ, ჩვენ გამოვიყენებთ ATtiny13 - ალბათ ყველაზე "მკვდარ" MK-ს, რომელიც დღეს იყიდება (მე არ ვიღებ PIC-ებს ან MCS-51 - მე შემიძლია მხოლოდ მათი დაპროგრამება, მაგრამ არ ვიცი როგორ დავწერო მათთვის პროგრამები) . ამ პატარა გოგონას არ აქვს საკმარისი ფეხები, ასე რომ, არავინ გვიშლის ხელს ცვლის რეგისტრების მიმაგრებაში! მე გადავწყვიტე გამომეყენებინა დარბაზის სენსორი სიჩქარის სენსორად.
მე დავხატე დიაგრამა:
მე მაშინვე არ ვახსენე ღილაკები - მაგრამ სად ვიქნებოდით მათ გარეშე? 4 ცალი გადატვირთვის გარდა (S1).
S2 - ჩართავს გრაგნილის რეჟიმს (რეჟიმი დაყენებულია ნაგულისხმევად) - ღერძის ყოველი შემობრუნებისას ის გაზრდის ბრუნთა რაოდენობის მნიშვნელობას 1-ით.
S3 - გრაგნილის რეჟიმი, შესაბამისად, ყოველი რევოლუციის დროს, ის შეამცირებს მნიშვნელობას 1-ით. შეგიძლიათ მაქსიმუმ „0“-მდე დაატრიალოთ - ის მინუსზე არ იქნება :)
S4 - EEPROM-ში შენახული ინფორმაციის წაკითხვა.
S5 - მიმდინარე მნიშვნელობის + რეჟიმის ჩაწერა EEPROM-ზე.
ბუნებრივია, უნდა გვახსოვდეს, რომ შემოხვევის ღილაკზე დავაჭიროთ თუ ვაპირებთ შემოხვევას, წინააღმდეგ შემთხვევაში ისინი გაბრტყელდებიან. შესაძლებელი იყო 1-ის ნაცვლად 3 ჰოლის სენსორის ან ვალკოდერის დაყენება და კონტროლერის პროგრამის შეცვლა ისე, რომ ბრუნის მიმართულებას თავად ირჩევს, მაგრამ ვფიქრობ ამ შემთხვევაში ეს ზედმეტია.
ახლა არც ისე ბევრი სქემის მიხედვით:
როგორც ხედავთ, მასში არაფერია ზებუნებრივი. მთელი ეს სირცხვილი იკვებება 5 ვოლტით, დენი მოიხმარს რაღაცას 85 mA რეგიონში.
TLE4905L დარბაზის სენსორიდან (შეგიძლიათ სცადოთ ჩართოთ სხვა, მე ავირჩიე პრინციპით "რაც უფრო იაფი და ხელმისაწვდომი"), სიგნალი ეგზავნება კონტროლერს, წარმოიქმნება შეფერხება და მიმდინარე მნიშვნელობა იცვლება, დამოკიდებულია არჩეული რეჟიმი. კონტროლერი აგზავნის ინფორმაციას ცვლის რეგისტრებში, საიდანაც ის, თავის მხრივ, იგზავნება შვიდი სეგმენტის ინდიკატორებზე ან კლავიატურაზე. გამოვიყენე შვიდსეგმენტიანი ანოდები საერთო კათოდით, მაშინვე მქონდა კვარტეტი ერთ შემთხვევაში, მაგრამ მსურველებს არავინ აწუხებს პარალელურად შეერთებულ 2 ორმაგ ან 4 ცალ ანოდზე ხრახნიან. ინდიკატორებზე წერტილი არ არის გამოყენებული, შესაბამისად, H (dp) ქინძისთავები კიდია ჰაერში. ინდიკატორები მუშაობენ დინამიურ რეჟიმში, ამიტომ R3-R9-ში წინააღმდეგობა ნაკლებია გამოთვლილ მნიშვნელობაზე. ინდიკატორების დრაივერები იკრიბება ტრანზისტორებზე VT1-VT4. შესაძლებელი იყო სპეციალიზებული მიკროსქემების გამოყენება, როგორიცაა ULN2803, მაგრამ მე გადავწყვიტე ტრანზისტორები, იმ მარტივი მიზეზის გამო, რომ დამიგროვდა ისინი - „ჭუჭყიანივით“, ზოგიერთი მათგანი ჩემზე ძველია.
ღილაკები S2-S4 - a la matrix კლავიატურა. ღილაკების "გამოსვლები" ეკიდა იმავე გამტარებლებს, როგორც რეგისტრის შეყვანა, ფაქტია, რომ კონტროლერიდან რეგისტრებში მონაცემების გაგზავნის შემდეგ, SHcp და Ds შეყვანებზე შეიძლება იყოს ნებისმიერი დონის სიგნალი, და ეს არ იქნება. რეგისტრების შიგთავსზე რაიმე სახით იმოქმედოს. ღილაკების „შეყვანები“ კიდია რეგისტრების გამოსავალზე, ინფორმაციის გადაცემა ხდება დაახლოებით შემდეგნაირად: ჯერ კონტროლერი აგზავნის ინფორმაციას რეგისტრებში ინდიკატორებზე შემდგომი გადაცემისთვის, შემდეგ აგზავნის ინფორმაციას ღილაკების სკანირებისთვის. რეზისტორები R14-R15 აუცილებელია რეგისტრის/კონტროლერის ფეხებს შორის „ბრძოლის“ თავიდან ასაცილებლად. ინფორმაციის გაგზავნა ეკრანზე და კლავიატურის სკანირება ხდება მაღალი სიხშირით (Tini13-ში შიდა გენერატორი დაყენებულია 9.6 MHz-ზე), შესაბამისად, რაც არ უნდა სწრაფად ვცადოთ ღილაკის დაჭერა და გაშვება, იქ დაჭერის დროს. იქნება ბევრი ოპერაცია და, შესაბამისად, ღილაკიდან ნული კონტროლერიდან შეხვედრის ერთისკენ გაივლის. ისე, ისეთი უსიამოვნო რამ, როგორიც არის ღილაკის კონტაქტების ისევ ჭექა-ქუხილი.
რეზისტორების R16-R17 გამოყენებით, ჩვენ კლავიატურას ვწევთ + დენის წყაროზე, ისე, რომ უმოქმედობის დროს კლავიატურის გამოსასვლელებიდან კონტროლერის შესასვლელებში მოვიდეს 1 და არა Z მდგომარეობა, რაც გამოიწვევს ცრუ დადებით შედეგებს. ამის გაკეთება შესაძლებელი იყო ამ რეზისტორების გარეშე, MK-ში არის საკმაოდ საკმარისი შიდა ასაწევი რეზისტორები, მაგრამ მე ვერ შევძელი მათი ამოღება - ღმერთი იცავს ფრთხილებს.
სქემის მიხედვით, როგორც ჩანს, ეს ყველაფერია დაინტერესებულთათვის, მე გთავაზობთ კომპონენტების ჩამონათვალს. ნება მომეცით დაუყოვნებლივ გავაკეთო დათქმა, რომ დასახელებები შეიძლება განსხვავდებოდეს ამა თუ იმ მიმართულებით.
IC1 არის ATtiny13 მიკროკონტროლერი, შეიძლება გამოყენებულ იქნას ასო V-სთან ერთად. SOIC ვერსიის პინოტი იგივეა, რაც დიაგრამაში. თუ ვინმეს აქვს სურვილი გამოიყენოს QFN/MLF საქმეში, მონაცემთა ცხრილი იქნება მათ ხელში.
IC2-IC3 - 8-ბიტიანი ცვლის რეგისტრები ჩამკეტით გამოსავალზე - 74HC595, პურის დაფაზე, რომელსაც ვიყენებდი DIP პაკეტებში დაფაზე მზა მოწყობილობაში SOIC. პინოტი იგივეა.
IC4 არის ციფრული ერთპოლარული დარბაზის სენსორი TLE4905L. გაყვანილობა მონაცემთა ცხრილის მიხედვით არის R2 - 1k2, C2-C3 4n7-ით. მანქანაზე სენსორის დაყენებისას შეამოწმეთ მაგნიტის რომელ მხარეს რეაგირებს იგი.
C1, C4 და C5 არის ელექტრომომარაგების ფილტრაციის კონდენსატორები, მე დავაყენე თითო 100n, ისინი მაქსიმალურად ახლოს უნდა იყოს დამონტაჟებული მიკროსქემების მიწოდების ქინძისთავებთან.
R1 - რეზისტორით ვწევთ გადატვირთვის ფეხს ელექტრომომარაგებამდე, 300 Ohm - და ასე შემდეგ. დავდებ 1კ.
R3-R9 - დენის შემზღუდველი რეზისტორები ინდიკატორებისთვის. 33 Ohm - 100 Ohm, რაც უფრო მაღალია წინააღმდეგობა, მით უფრო დაბალი იქნება შუქი.
R10-R13 - შეზღუდეთ დენი ტრანზისტორი ბაზის სქემებში. პურის დაფაზე იყო 510 Ohms, მე კი 430 Ohms დავდე დაფაზე.
VT1-VT4 - KT315 ნებისმიერი ასო ინდექსებით, შეიძლება შეიცვალოს KT3102, KT503 და ანალოგებით.
R14-R15, როგორც ზემოთ დავწერე, "ბრძოლის" თავიდან ასაცილებლად, ვფიქრობ, შეგიძლიათ დააყენოთ 1k და უფრო მაღალიდან, მაგრამ არ აწიოთ ის 4k7-ზე მაღლა. R16-R17-ით უდრის 300 Ohm-ს, მთლიანი წინააღმდეგობასერიებთან დაკავშირებული რეზისტორები არ უნდა აღემატებოდეს 5k-ს, 5k-ზე მეტი წინააღმდეგობის გაზრდით, გამოჩნდა ცრუ ღილაკის გააქტიურება.
პურის დაფაზე მრიცხველის მუშაობის შემოწმების შემდეგ, დროა მოაწყოთ ტექნიკის ნაწილი "სრულ მოწყობილობაში".
დაფა დავდე SL-ში და დიდი ალბათობით ის არ იყო ოპტიმალურად დალაგებული - მოვარგე არსებულ ნაწილებს, ძალიან მეზარებოდა ბაზარზე წასვლა სხვების საყიდლად. ზოგადად, გავავრცელე, დავბეჭდე გამჭვირვალე ლომონდის ცალმხრივ ფილმზე შავი და თეთრი ლაზერული პრინტერები. დაბეჭდილია უარყოფითად, 2 ეგზემპლარად. უარყოფითი - იმიტომ, რომ მე ვაპირებდი PP-ს დამზადებას ფირის ფოტორეზისტის გამოყენებით და ის, თავის მხრივ, უარყოფითია. და 2 ეგზემპლარად - ისე, რომ კომბინირებისას მიიღოთ ტონერის ყველაზე გაუმჭვირვალე ფენა. აეროზოლის ქილის სურვილიც არ მაქვს გამჭვირვალე 21
ყიდვა.
ჩვენ ვაერთიანებთ ფოტო ნიღბებს, ვავლენთ მათ „სინათლეს“, ისე, რომ ხვრელები იდეალურად მოერგოს და დავამაგროთ ისინი ჩვეულებრივი სტეპლერით - ამ პროცედურას პასუხისმგებლობით უნდა მივუდგეთ, ამაზე დიდწილად დამოკიდებულია მომავალი დაფის ხარისხი.
ახლა ჩვენ უნდა მოვამზადოთ კილიტა PCB. ზოგი მას წვრილი ქვიშის ქაღალდით ასხამს, ზოგს საშლელით, მაგრამ ამ ბოლო დროს მირჩევნია შემდეგი ვარიანტები:
1. თუ სპილენძი არ არის ძალიან ბინძური ოქსიდებით, უბრალოდ წაშალეთ იგი ამიაკით დასველებული ტამპონით - ოჰ, სუნიანი ნაგავი, გეტყვით, არ მომწონს ეს აქტივობა, მაგრამ ის სწრაფია. იდეალურ შემთხვევაში, ამის შემდეგ სპილენძი არ გაბრწყინდება, მაგრამ სპირტი გამორეცხავს ოქსიდებს და დაფა ამოიჭრება.
2. თუ სპილენძი საკმაოდ ჭუჭყიანია, ვაპრიალებ თექის ბორბალით. ბურღზე და ვოილაზე ვკიდებ. არ არის საჭირო აქ განსაკუთრებული გულმოდგინება, მე არ ვიყენებ GOI პასტას შემდგომი ატვირთვისთვის, საკმარისია მხოლოდ თექის წრე. სწრაფი და ეფექტური.
ზოგადად, ჩვენ მოვამზადეთ - ფოტოს ვერ დავდებ, ინფექცია სარკესავით ანათებს და ფოტოზე არაფერი ჩანს, მეც ცელქი ფოტოგრაფი ვარ.
კარგი, მაშინ ჩვენ გავაბრტყელებთ ფოტორეზისტს.
უნდა ვაღიარო, რომ ჩემს ფოტორეზისტს ვადის გასვლის თარიღი აქვს და ძაღლი უარს ამბობს დაფაზე დამაგრებაზე, ამიტომ ჯერ დაფა უნდა გავათბო. ფენით ვათბობ, მაგრამ უთოც შეგიძლია. კარგი იქნება, რა თქმა უნდა, ამ მიზნებისთვის ლამინატორის ქონა, მაგრამ:
- ცომი ახლა მეცოდება
- როცა ცომი არ მაწუხებდა, უბრალოდ სულელურად ზარმაცი ვიყავი :)
ჩვენ ვახვევთ ფოტორეზისტს ცხელ დაფაზე, გვახსოვს ამოღება დამცავი ფილმი. ჩვენ ვცდილობთ გავაკეთოთ ეს რაც შეიძლება ფრთხილად, რათა არ იყოს ჰაერის ბუშტები დაფასა და ფოტორეზისტებს შორის. მოგვიანებით მათთან ბრძოლა ცალკე ტრაკია. თუ ბუშტები გამოჩნდება, მე მათ ნემსით ვხვრეტავ.
შეგიძლიათ გადახვიდეთ ნებისმიერ განათებაში და არ ჩაერთოთ სისულელეებში, გაიხსენოთ მოყვარული ფოტოგრაფები, ჩვენს საქმეში მთავარია მზის და ულტრაიისფერი გამოსხივების სხვა წყაროების არარსებობა.
დაწნულის შემდეგ, მე ვაცხელებ დაფას ცხელი რკინით გაზეთით, ეს კურნავს პუნქციულ ბუშტებს და ფოტორეზისტი მჭიდროდ ეწებება.
შემდეგ შაბლონს ვათავსებთ დაფაზე, აქ დაფა ორმხრივია, ამიტომ შაბლონი დაფის ორივე მხარეს იქნება. ამ "სენდვიჩს" ვათავსებთ პლექსიგლასის ფურცელზე და ვაჭერთ ზემოდან მეორე ფურცელს. საჭიროა 2 ფურცელი, რათა ერთი მხარის გამოფენის შემდეგ, დაფა ფრთხილად გადააბრუნოთ ფოტონიღბის გადაადგილების გარეშე.
მეორე მხრიდან გავანათოთ. მე ვიყენებ ამ ნათურას:
ვანათებ დაახლოებით 150 მმ მანძილიდან 7 წუთის განმავლობაში (დისტანცია და დრო შერჩეულია ექსპერიმენტულად).
შემდეგ მოამზადეთ სუსტი ტუტე ხსნარი - ჩაის კოვზი სოდა ნაცარი ნახევარ ლიტრ წყალზე. წყლის ტემპერატურა არ არის მნიშვნელოვანი. ურიეთ სანამ მთელი სოდა არ დაიშლება. ეს ხსნარი არ არის საშიში თქვენი ხელებისთვის, შეხებისას იგრძნობა საპნიანი წყალი.
ჩვენ ვიღებთ დამცავ ფილას ჩვენი დაფიდან და ვასხამთ მას ხსნარში, რის შემდეგაც აქტიურად ვიწყებთ ფუნჯით მის გახეხვას - მაგრამ არ დავაჭიროთ ძალიან ძლიერად, რათა არ გატყდეს ტრეკები. თქვენ, რა თქმა უნდა, არ შეგიძლიათ მისი გახეხვა, მაგრამ შემდეგ არის ფოტორეზისტის ჩამობანის შესაძლებლობა:
- დიდი ხანის განმვლობაში
- ყველაფერი ჩამოირეცხება
მაგრამ არც ერთი და არც მეორე არ გვიწყობს, შესაბამისად სამი.
ჩვენ ვიღებთ რაღაც მსგავსს:
დაფას გავრეცხავთ წყლით, ხსნარს არ გადავასხამთ - მოგვიანებით დაგვჭირდება. თუ დაფის დამუშავების დროს ზოგიერთი ბილიკი გაიშალა ან ჰაერის ბუშტებმა გააფუჭეს ტრასები, საჭიროა ამ ადგილების რეტუშირება ცაპონის ლაქით ან სპეციალური მარკერით. შემდეგ ჩვენ ვჭრით დაფას. მე ვიყენებ რკინის ქლორიდს.
აკრავის შემდეგ დაფას ისევ გავრეცხავთ წყლით და ვაბრუნებთ ტუტე ხსნარში, რათა ჩამოიბანოთ აღარ საჭირო ფოტორეზისტი. ერთი საათი საკმარისია.
შემდეგი ჩვენ სულელი გარშემო. პატარა მიკროსქემის დაფებისთვის ან ძალიან სამკაულებისთვის ვიყენებ ვარდის შენადნობს მიკროსქემის დაფებისთვის, დაფაზე უბრალოდ ვასხამ შედუღების უთოს ბრტყელი წვერით. ამ შემთხვევაში, აზრი აქვს დაფის დაფარვას ფლუქსით.
შეიძლება ვინმეს მოეჩვენოს, რომ ბილიკები არ გამოვიდა ძალიან გლუვი - ბილიკები გამოვიდა გლუვი :) ეს არის საკონსერვო მეთოდის ღირებულება შედუღების რკინით, თუნუქი თანაბრად არ დევს.
დასრულებულ ვერსიაში არ არის გადატვირთვის ღილაკი - კარგი, მე არსად მქონდა მისი დამაგრება დაფაზე, ამიტომ არ არის საკმარისი ადგილი და თუ MK გაიყინება, მაშინ გამორთავს დენს და ისევ ჩავრთავ. დენის წრეში ასევე გამოჩნდა დიოდი - დაცვა პოლარობის შებრუნებისგან. რაც შეეხება დანარჩენ ნაწილებს, გამოვიყენე მხოლოდ ის, რაც ხელთ იყო, რის გამოც არის SMD და რეგულარული ქეისებიც.
ჩვენ ვამაგრებთ სენსორს აპარატის სტაციონარულ ნაწილს და ვამაგრებთ მაგნიტს ბრუნვის ღერძზე ისე, რომ ბრუნვისას იგი გაიაროს სენსორიდან 3-5 მმ. აბა, გამოვიყენოთ :)
ეს უკვე დარწმუნებულია, მადლობა ყველას ყურადღებისთვის და ამხანაგებო GP1და ავრეალიგანვითარებაში დახმარებისთვის.
ყველა რადიომოყვარულისთვის ან ენთუზიასტისთვის, რომელიც დაინტერესებულია ხმის რეპროდუცირების აღჭურვილობით, გრაგნილი მანქანა არის ძალიან პოპულარული მოწყობილობა. ასეთი მოწყობილობები გამოიყენება ტრანსფორმატორებისთვის ერთფენიანი და მრავალფენიანი ცილინდრული ხვეულების მოსახვევად.
ამ სტატიაში ჩვენ შევისწავლით გრაგნილი მანქანის დიზაინსა და მუშაობის პრინციპს და ასევე განვიხილავთ ნაბიჯ ნაბიჯ ინსტრუქციები, რის შემდეგაც თქვენ შეგიძლიათ გააკეთოთ ასეთი აღჭურვილობა საკუთარი ხელით.
1 დიზაინი და მუშაობის პრინციპი
გრაგნილი მანქანა შეუცვლელია მსგავსი პროდუქტების წარმოებაში. არსებობს ორი ტიპის ასეთი ერთეული - ავტომატური და მექანიკური, ხოლო ეს უკანასკნელი პრაქტიკულად არ არის გავრცელებული ინდუსტრიულ სექტორში შეზღუდული ფუნქციონირების გამო.
თუმცა, საერთო ზომები, მძიმე წონა და ავტომატური გრაგნილების ღირებულება მათ გამოუყენებელს ხდის ყოველდღიურ ცხოვრებაში, ამიტომ უმჯობესია აიღოთ მექანიკური მანქანა თქვენი სახლისთვის. ასეთი მოწყობილობის სტანდარტული დიზაინი შედგება შემდეგი ელემენტებისაგან:
- ლითონის ან ხისგან დამზადებული ორი ვერტიკალური ბოძისგან დამზადებული საყრდენი ჩარჩო, რომელთა შორისაა დამაგრებული ჰორიზონტალური ღერძი (ცენტრალურ პოსტზე - ბორბლიანი ფირფიტებისთვის, გარეზე - თავად ხვეულისთვის);
- დიდი და პატარა გადაცემათა კოლოფი, რომელიც გადასცემს ბრუნვას ბორბალზე;
- დიდ მექანიზმზე დამაგრებული სახელური, რომლის მეშვეობითაც ბრუნავს ღერძი რგოლთან ერთად;
- დამაგრების ელემენტები - ხრახნები და კაკალი.
![]()
ასეთი მოწყობილობის მუშაობის პრინციპი უკიდურესად მარტივია - სახელურის ბრუნვა იწვევს მავთულის ან კაბელის შემოხვევას მბრუნავ ჩარჩოზე, რომელიც მოძრაობს მავთულის ჰორიზონტალურ სიბრტყეზე.
მოხვევების რაოდენობის მონიტორინგი შეიძლება განხორციელდეს როგორც ვიზუალურად, ასევე სპეციალური მრიცხველების გამოყენებით, რომელთაგან უმარტივესი არის ჩვეულებრივი ველოსიპედის ოდომეტრი. უფრო მოწინავე მანქანებში, სპეციალური მაგნიტური ლერწმის სენსორი გამოიყენება მრიცხველად.
1.1 ჟურნალის მანქანები
სამრეწველო გრაგნილების ერთეულებს შორის ფართო პოპულარობით სარგებლობს საკაბელო გრაგნილი მანქანა SRN-05M3. ეს მოდელიექსპლუატაციაში შევიდა ჯერ კიდევ სსრკ-ს დღეებში და მას შემდეგ კარგად დაამტკიცა თავი მისი მაღალი საიმედოობისა და შესრულების გამო. მეორად ბაზარზე SRN-05M3 შეგიძლიათ იხილოთ 15-20 ათასი რუბლით.

SRN-05M3 დამზადებულია თუჯისგან, აღჭურვილობის წონაა 80 კგ, ზომები 877 * 840 * 142 სმ. მანქანა საშუალებას გაძლევთ მოახვიოთ ერთფენიანი, ორფენიანი და ტოროიდული ხვეულები ავტომატური დაგების რეჟიმში. კაბელის მინიმალური დიამეტრია 0,05 მმ, მაქსიმალური 0,5 მმ. დანადგარი აღჭურვილია UL-62 ტიპის ერთფაზიანი ელექტროძრავით, რომლის სიმძლავრეა 0,18 კვტ. ყველაზე მაღალი ბრუნვის სიჩქარე გრაგნილის დროს არის 5100 rpm.

საყოფაცხოვრებო მოხმარებისთვის საუკეთესო არჩევანიიქნება მექანიკური მანქანა NZ-1 (ჩინეთი). მიუხედავად წარმოშობის ქვეყნისა, NZ-1 საკმაოდ საიმედო და ფუნქციონალური აღჭურვილობაა. დანადგარი განკუთვნილია 150 მმ-მდე დიამეტრის გრაგნილი კოჭებისთვის, მაქსიმალური სიგანე არაუმეტეს 100 მმ. გადაცემათა კოეფიციენტი არის 1:08 ინჩი სწრაფი რეჟიმიგრაგნილი და 1:0.1 ნელი. Მაქსიმალური სიჩქარე- არაუმეტეს 1000 rpm.
NZ-1 აღჭურვილია მექანიკური ტიპის ძაფის მრიცხველით. კორპუსი დამზადებულია ლითონისგან, საყრდენი ჩარჩო დამზადებულია თუჯისგან. მანქანა აღჭურვილია საბურავით, რომელიც საშუალებას გაძლევთ დაუკავშიროთ მას ელექტროძრავა ქამრის ამძრავით და იმუშაოთ ავტომატური რეჟიმი. ასეთი აღჭურვილობის ღირებულება მერყეობს 4-5 ათას რუბლს შორის.
1.2 ხელნაკეთი გრაგნილი მანქანა (ვიდეო)
2 გრაგნილი მანქანის დამზადება საკუთარი ხელით
გამორჩეულია ამ განყოფილებასსტატიაში, საკაბელო დახვევის მანქანა საშუალებას გაძლევთ იმუშაოთ ხვეულებით კვადრატულ, მრგვალ და მართკუთხა ჩარჩოზე, რომლის დიაგონალია 200 მმ-მდე, ის შეიძლება აღჭურვილი იყოს სხვადასხვა საბურავებით, რაც საშუალებას მოგცემთ შეცვალოთ ლიკვიდაცია 0,3-3,2 ფარგლებში; მმ.

ქვემოთ მოცემულ დიაგრამაზე ნაჩვენებია აპარატის ჩარჩო. ჩარჩოს ასაწყობად გამოიყენება ლითონის ფურცლები 15 მმ სისქით (ძირისთვის) და 5 მმ (გვერდითი მონაკვეთებისთვის). ლითონის სისქეზე დაზოგვა არ არის მისასალმებელი, რადგან ეს იწვევს დანადგარის წონის შემცირებას და, შედეგად, მისი სტაბილურობის გაუარესებას.
თქვენ დაგჭირდებათ ჩარჩოს ბლანკების ამოჭრა (ზომები დაცულია) და გაბურღეთ მათში ორი ხვრელი, შემდეგ კი გვერდები შედუღებამდეა საბაზისო ფირფიტაზე. ქვედა ხვრელში უნდა დაამონტაჟოთ 2 საკისარი, ზედა ხვრელში ბრუნვის ლილვის ბუჩქები.

ლილვის სახით შეგიძლიათ გამოიყენოთ 12 მმ გლუვი გამაგრების ზოლი, რომელიც ჯერ უნდა იყოს ქვიშიანი და შეღებილი. სტეკერის ყდისთვის შეგიძლიათ აიღოთ ჯოხი 10 მმ დიამეტრით, რომლის მთელ სიგრძეზე იჭრება სტანდარტული M12 * 1.0 ძაფი.

ჯობია სამმაგი საბურავები გააკეთოთ, მაგრამ გაითვალისწინეთ, რომ მათი საერთო სისქე 20 მმ-ს არ უნდა აღემატებოდეს. უფრო დიდი სისქის შემთხვევაში, საჭირო იქნება ლილვების სიგრძის დამატებით გაზრდა მსგავსი ზომით. დიაგრამაში მითითებული ბორბლების კომბინაცია იძლევა 54 სხვადასხვა გრაგნილის საფეხურის გამოყენების საშუალებას. თუ თქვენ გჭირდებათ 0,31 მმ-ზე ნაკლები დიამეტრის მავთულებით მუშაობა, დაგჭირდებათ დამატებითი 12/16/20 მმ საბურველი, რომლითაც შეგიძლიათ 0,15 მმ-იანი მავთულის გადახვევა.

ხელით ამძრავის ასაგებად დაგჭირდებათ დიდი გადაცემათა კოლოფი და სახელური, რომლებიც ფიქსირდება ზედა ლილვზე სამაგრის საშუალებით. კოლეტის გამოყენების წყალობით, საჭიროების შემთხვევაში, შეგიძლიათ შეწყვიტოთ გრაგნილი სახელურის დამაგრებით, რითაც თავიდან აიცილებთ ბორბლის გადახვევას.
გრაგნილი მანქანისთვის ძაფის მრიცხველი მზადდება ჩვეულებრივი კალკულატორისგან. ასევე დაგჭირდებათ მაგნიტი ლერწმის სენსორით (შეიძლება შეიძინოთ რადიოტექნიკის ნებისმიერ მაღაზიაში), რომლის მილები უნდა იყოს დაკავშირებული კალკულატორის კონტაქტებთან "=" ღილაკზე.
2.1 როგორ ვიმუშაოთ ხელნაკეთ მანქანაზე?
ასე რომ, აღჭურვილობა მზად არის, როგორ ვიმუშაოთ მასზე? გრაგნილი ჩარჩოს დასაყენებლად აუცილებელია ზედა ლილვის გაშლა სამონტაჟო ბუდედან ჩარჩოს სიგრძის ტოლ სიგრძემდე. შემდეგი, მარჯვენა დისკი და კოჭის მანდრილი დამონტაჟებულია ლილვზე, რომლის თავზე დევს თავად ხვეული. შემდეგი ნაბიჯი არის მარცხენა დისკის დაყენება და თხილის ხრახნი, რის შემდეგაც ყველაფერი დაყენებულია თავდაპირველ მდგომარეობაში.

ზედა ლილვის ხვრელში მოთავსებულია ლურსმანი და ჩარჩოს ცენტრშია მოთავსებული, რის შემდეგაც ჩარჩო იკვრება თხილით. შემდგომი ოპერაციები ხორციელდება შემდეგი თანმიმდევრობით:
- შესანახი ლილვზე მოთავსებულია შესაფერისი დიამეტრის ღვეზელი.
- საბურავის როტაციით, სტეკერი გადადის ექსტრემალურ პოზიციაზე, ბორბლის ერთ-ერთ მხარეს.
- მავთულის ქამარი იდება ღვეზე - რგოლში ან რვა ფიგურაში. მავთულის ბოლო უნდა იყოს ხრახნილი შუა ლილვის ქვეშ, მოთავსებული სტეკერის ღეროში და დამაგრებული ჩარჩოზე. მავთულის დაჭიმულობა რეგულირდება დამჭერების გამოყენებით.
- გრაგნილის დასაწყისში კალკულატორზე იბეჭდება კომბინაცია „1+1“, რის შემდეგაც სახელური ტრიალებს. ლილვის ყოველი სრული ბრუნვისას, კალკულატორი დამოუკიდებლად გაზრდის ეკრანის რაოდენობას ერთით, რითაც დათვლის მავთულის ბრუნთა რაოდენობას.
ვინაიდან ამ მოწყობილობას აქვს უკიდურესად მარტივი მოწყობილობა, რომელსაც არ აქვს რაიმე სახის გრაგნილი მანქანის მართვის კონტროლერი, მუშაობის დროს თქვენ დაგჭირდებათ მუდმივი მონიტორინგი ბორბალზე და, საჭიროების შემთხვევაში, ჩარჩოზე კაბელის ხელით რეგულირება.

თუ გსურთ მანქანა უფრო ფუნქციონალური გახადოთ, დაგჭირდებათ დიზაინის გართულება მასში კონტროლერის დამატებით. ეს საშუალებას მოგცემთ ავტომატიზიროთ სამუშაო ნაკადი, თუმცა, სრულად მექანიკური დაწყვილებისთვის, თქვენ უნდა დააინსტალიროთ სტეპერ ძრავა კონტროლერში (ჩვეულებრივი 24 ვოლტიანი დრაივი, რომელიც მუშაობს 44-60 ნაბიჯზე რევოლუციის რეჟიმში). დენის ტრანზისტორები ამ ნაკრებისთვის შეირჩევა ძრავის მახასიათებლების მიხედვით. ATmega8 მოწყობილობა იდეალურია, როგორც კონტროლერი, შეგიძლიათ შეიძინოთ 150-200 რუბლი.