Kära Bobot, kan du berätta lite mer om impulser?
Det är bra att du frågade, min vän Bibot. Eftersom pulser är de viktigaste informationsbärarna inom digital elektronik är det därför mycket viktigt att känna till de olika egenskaperna hos pulser. Låt oss kanske börja med en enda impuls.
En elektrisk impuls är en ökning av spänning eller ström under en viss och begränsad tidsperiod.
En puls har alltid en början (stigande flank) och ett slut (fallande flank).
Du vet förmodligen redan att i digital elektronik kan alla signaler representeras av bara två spänningsnivåer: "logisk etta" och "logisk noll". Dessa är bara konventionella spänningsvärden.
En "logisk etta" tilldelas en hög spänningsnivå, vanligtvis cirka 2-3 volt, medan en "logisk nolla" anses vara en spänning nära noll. Digitala pulser representeras grafiskt som rektangulära eller trapetsformade:
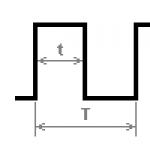
Huvudmängden för en enstaka puls är dess längd. Pulslängden är den tid under vilken den aktuella logiska nivån har ett stabilt tillstånd. I figuren markerar den latinska bokstaven t längden på högnivåpulsen, det vill säga logisk "1". Pulslängden mäts i sekunder, men vanligare i millisekunder (ms), mikrosekunder (μs) och till och med nanosekunder (ns). En nanosekund är en väldigt kort tid! Komma ihåg:
1 ms = 0,001 sek.
1 µs = 0,000001 sek
1 ns = 0,000000001 sek
Engelska förkortningar används också: ms - millisekund, μs - mikrosekund, ns - nanosekund.
På en nanosekund kommer jag inte ens ha tid att göra ett ljud!
Säg mig, Bobot, vad händer om det kommer många impulser?
Bra fråga, Beebot! Ju fler impulser, desto mer information kan de förmedla. Många impulser har många egenskaper. Det enklaste är pulsrepetitionsfrekvensen. Det är vanligt att ta en sekund per tidsenhet. Frekvensenheten är hertz, uppkallad efter den tyske fysikern Heinrich Hertz. En hertz är inspelningen av en hel puls på en sekund. Om tusen vibrationer uppstår per sekund blir det 1000 hertz, eller förkortat 1000 Hz, vilket är lika med 1 kilohertz, 1 kHz. Du kan också hitta den engelska förkortningen: Hz - Hz. Frekvensen anges med bokstaven.
F
Det finns flera fler egenskaper som endast uppträder med deltagande av två eller flera impulser. En av dessa viktiga parametrar för pulssekvensen är perioden. Pulsperioden är tidsintervallet mellan två karakteristiska punkter för två intilliggande pulser..

Vanligtvis mäts perioden mellan två ökningar eller fall av intilliggande pulser och betecknas med en stor latinsk bokstav
T Pulsrepetitionsperioden är direkt relaterad till frekvensen av pulssekvensen, och den kan beräknas med formeln: T=1/F Om pulslängden Pulsperioden är tidsintervallet mellan två karakteristiska punkter för två intilliggande pulser. t exakt lika med halva perioden".
, då kallas en sådan signal ofta " slingra sig
Arbetscykeln för pulser är förhållandet mellan pulsrepetitionsperioden och deras varaktighet och betecknas med bokstaven S: S=T/t Duty factor är en dimensionslös storhet och har inga måttenheter utan kan uttryckas i procent. Termen Duty cycle finns ofta i engelska texter detta är den så kallade duty cycle.
Arbetscykeln D är den reciproka av arbetscykeln.
Fyllningsfaktorn uttrycks vanligtvis i procent och beräknas med formeln: D=1/S
Kära Bobot, enkla impulser har så många olika och intressanta saker! Men så smått börjar jag bli förvirrad.
Min vän, Bibot, du märkte rätt, impulser är inte så enkla! Men det är bara lite kvar.
Om du lyssnat noga på mig så kanske du har märkt att om du ökar eller minskar pulslängden och samtidigt minskar eller ökar pausen mellan pulserna lika mycket, så kommer pulsrepetitionsperioden och frekvensen att förbli oförändrad! Detta är ett mycket viktigt faktum som vi kommer att behöva mer än en gång i framtiden.

För att överföra information i digital elektronik (även kallad diskret elektronik) kan två eller flera ledare eller kanaler med olika pulssignaler användas. I detta fall överförs information med hänsyn till vissa regler. Denna metod låter dig avsevärt öka hastigheten för informationsöverföring eller lägger till möjligheten att kontrollera informationsflödet mellan olika kretsar.
De uppräknade möjligheterna att överföra information med hjälp av impulser kan användas antingen på egen hand separat eller i kombination med varandra.
Det finns också många standarder för att överföra information med hjälp av pulser, till exempel I2C, SPI, CAN, USB, LPT.
Tidigare, för att driva enheter, använde de en krets med en step-down (eller step-up, eller multi-winding) transformator, en diodbrygga och ett filter för att jämna ut krusningar. För stabilisering användes linjära kretsar med parametriska eller integrerade stabilisatorer. Den största nackdelen var den låga effektiviteten och stora vikten och dimensionerna hos kraftfulla nätaggregat.
Alla moderna elektriska hushållsapparater använder strömförsörjning (UPS, IPS - samma sak). De flesta av dessa nätaggregat använder en PWM-kontroller som huvudkontrollelement. I den här artikeln kommer vi att titta på dess struktur och syfte.
Definition och huvudsakliga fördelar
En PWM-kontroller är en enhet som innehåller ett antal kretslösningar för att styra strömbrytare. I det här fallet sker styrning på basis av information som tas emot genom återkopplingskretsar för ström eller spänning - detta är nödvändigt för att stabilisera utgångsparametrarna.
Ibland kallas PWM-pulsgeneratorer för PWM-kontroller, men de har inte möjlighet att ansluta återkopplingskretsar, och de är mer lämpade för spänningsregulatorer än för att ge stabil ström till enheter. Men i litteraturen och internetportaler kan du ofta hitta namn som "PWM-kontroller, på NE555" eller "... på Arduino" - detta är inte helt sant av ovanstående skäl, de kan bara användas för att reglera utdataparametrar, men inte för att stabilisera dem.

Förkortningen "PWM" står för pulsbreddsmodulering - detta är en av metoderna för att modulera en signal inte på grund av utspänningen, utan just genom att ändra pulsbredden.
Som ett resultat bildas en simulerad signal genom att integrera pulser med C- eller LC-kretsar, med andra ord på grund av utjämning.
Huvudfunktioner
För en PWM-signal kan två huvudegenskaper särskiljas:
1. Pulsfrekvens - omvandlarens driftfrekvens beror på detta. Typiska frekvenser är över 20 kHz, faktiskt 40-100 kHz.
2. Driftsfaktor och driftcykel. Dessa är två intilliggande kvantiteter som kännetecknar samma sak. Arbetscykeln kan betecknas med bokstaven S och arbetscykeln med D.
där T är signalperioden,
Den del av tiden från perioden då en styrsignal genereras vid regulatorns utgång är alltid mindre än 1. Arbetscykeln är alltid större än 1. Vid en frekvens på 100 kHz är signalperioden 10 μs, och omkopplaren är öppen i 2,5 μs, då är arbetscykeln 0,25, i procent - 25 %, och arbetscykeln är 4.

Det är också viktigt att ta hänsyn till den interna utformningen och syftet med antalet hanterade nycklar.
Skillnader från linjära förlustsystem
Som redan nämnts är fördelen jämfört med linjära kretsar den höga effektiviteten (mer än 80, och för närvarande 90%). Detta beror på följande:
Låt oss säga att den utjämnade spänningen efter diodbryggan är 15V, belastningsströmmen är 1A. Du måste skaffa en stabiliserad 12V strömförsörjning. Faktum är att en linjär stabilisator är ett motstånd som ändrar sitt värde beroende på ingångsspänningen för att få en nominell utgång - med små avvikelser (bråkdelar av volt) när ingången ändras (enheter och tiotals volt).
Som bekant frigör motstånd termisk energi när elektrisk ström flyter genom dem. Samma process sker på linjära stabilisatorer. Den tilldelade effekten kommer att vara lika med:
Ploss=(Uin-Uout)*I
Eftersom belastningsströmmen i det övervägda exemplet är 1A, ingångsspänningen är 15V och utspänningen är 12V, kommer vi att beräkna förlusterna och effektiviteten för den linjära stabilisatorn (KRENK eller typ L7812):
Ploss=(15V-12V)*1A = 3V*1A = 3W
Då är effektiviteten lika med:
n=Puseful/Pconsumed
n=((12V*1A)/(15V*1A))*100%=(12W/15W)*100%=80%
Huvudfunktionen hos PWM är att kraftelementet, låt det vara en MOSFET, antingen är helt öppet eller helt stängt och ingen ström flyter genom det. Därför beror effektivitetsförluster endast på konduktivitetsförluster
Och byteförluster. Detta är ett ämne för en separat artikel, så vi kommer inte att uppehålla oss vid denna fråga. Dessutom uppstår strömförsörjningsförluster (ingång och utgång, om strömförsörjningen är nätverksdriven), såväl som på ledare, passiva filterelement, etc.
Allmän struktur
Låt oss överväga den allmänna strukturen för en abstrakt PWM-kontroller. Jag använde ordet "abstrakt" eftersom de i allmänhet är lika, men deras funktionalitet kan fortfarande skilja sig inom vissa gränser, och strukturen och slutsatserna kommer att skilja sig åt i enlighet därmed.
Inuti PWM-kontrollern, som alla andra IC, finns det en halvledarkristall på vilken en komplex krets finns. Styrenheten innehåller följande funktionsenheter:
1. Pulsgenerator.
2. Referensspänningskälla. (JON)
3. Kretsar för bearbetning av återkopplingssignalen (OS): felförstärkare, komparator.
4. Pulsgeneratorkontroller inbyggda transistorer, som är utformade för att styra en eller flera strömknappar.
Antalet strömbrytare som en PWM-styrenhet kan styra beror på dess syfte. De enklaste flyback-omvandlarna i deras krets innehåller 1 strömbrytare, halvbrygga kretsar (push-pull) - 2 brytare, bryggkretsar - 4.

Valet av PWM-kontroller beror också på typen av nyckel. För att styra en bipolär transistor är huvudkravet att PWM-styrenhetens utgående styrström inte är lägre än transistorströmmen dividerat med H21e, så att den kan slås på och av helt enkelt genom att skicka pulser till basen. I det här fallet gör de flesta kontroller.
När det gäller förvaltning finns det vissa nyanser. För att snabbt stänga av måste du ladda ur portkapacitansen. För att göra detta är grindutgångskretsen gjord av två nycklar - en av dem är ansluten till strömförsörjningen med IC-stiftet och styr grinden (slår på transistorn), och den andra är installerad mellan utgången och jord, när du måste stänga av krafttransistorn - den första nyckeln stänger, den andra öppnas, stänger slutaren till marken och laddar ur den.

Intressant:
Vissa PWM-kontroller för strömförsörjning med låg effekt (upp till 50 W) använder inte inbyggda eller externa strömbrytare. Exempel - 5l0830R
Generellt sett kan en PWM-styrenhet representeras som en komparator, vars ena ingång matas med en signal från återkopplingskretsen (FC), och en sågtandsändringssignal tillförs den andra ingången. När sågtandssignalen når och överstiger OS-signalen i storlek, visas en puls vid utgången av komparatorn.
När signalerna vid ingångarna ändras ändras pulsbredden. Låt oss säga att du kopplade en kraftfull konsument till strömförsörjningen, och spänningen vid dess utgång sjunker, då kommer OS-spänningen också att sjunka. Sedan, under större delen av perioden, kommer sågtandssignalen att överstiga återkopplingssignalen, och pulsbredden kommer att öka. Allt ovanstående återspeglas till viss del i graferna.


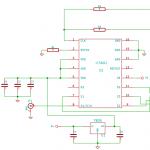
Funktionsdiagram av en PWM-kontroller som använder TL494 som exempel, vi kommer att titta på det mer detaljerat senare. Syftet med stiften och enskilda noder beskrivs i nästa underrubrik.

Pin-uppgift
PWM-kontroller finns i olika paket. De kan ha från tre till 16 eller fler slutsatser. Följaktligen beror flexibiliteten för att använda styrenheten på antalet stift, eller snarare deras syfte. Till exempel har en populär mikrokrets oftast 8 stift, och en ännu mer ikonisk har TL494- 16 eller 24.
Låt oss därför titta på typiska pinnamn och deras syfte:
GND- den gemensamma terminalen är ansluten till kretsens minus eller till jord.
Uc(Vc)- strömförsörjning av mikrokretsen.
Ucc (Vss, Vcc)- Utgång för effektstyrning. Om strömmen sjunker, finns det en möjlighet att strömbrytarna inte öppnas helt, och på grund av detta kommer de att börja värmas upp och brinna ut. Utgången behövs för att inaktivera styrenheten i en sådan situation.
UT- som namnet antyder är detta utgången från styrenheten. Styr-PWM-signalen för strömbrytare matas ut här. Vi nämnde ovan att omvandlare av olika topologier har olika antal nycklar. Namnet på stiftet kan variera beroende på detta. Till exempel, i halvbrygga styrenheter kan det kallas HO och LO för de höga respektive låga switcharna. I detta fall kan utgången vara enkelsidig eller push-pull (med en switch och två) - för att styra fälteffekttransistorer (se förklaring ovan). Men själva styrenheten kan vara för encykel- och push-pull-kretsar - med en respektive två utgångsstift. Detta är viktigt.
Vref- referensspänning, vanligtvis ansluten till jord via en liten kondensator (enheter av mikrofarader).
ILIM- signal från strömsensorn. Behövs för att begränsa utströmmen. Ansluts till återkopplingskretsar.
ILIMREF- aktiveringsspänningen för ILIM-benet är inställd på den
SS- en signal genereras för mjukstart av regulatorn. Designad för smidig övergång till nominellt läge. En kondensator är installerad mellan den och den gemensamma ledningen för att säkerställa en mjuk start.
RtCt- terminaler för anslutning av en timing RC-krets, som bestämmer frekvensen för PWM-signalen.
KLOCKA- klockpulser för att synkronisera flera PWM-styrenheter med varandra, sedan är RC-kretsen ansluten endast till huvudstyrenheten, och RT-slavarna med Vref, CT-slavarna är anslutna till den gemensamma.
RAMPär jämförelseingången. En sågtandsspänning appliceras på den, till exempel från Ct-stiftet. När den överskrider spänningsvärdet vid felförstärkningsutgången, visas en avstängningspuls vid OUT - grunden för PWM-reglering.
INV och NONINV- dessa är de inverterande och icke-inverterande ingångarna på komparatorn som felförstärkaren är byggd på. Med enkla ord: ju högre spänning på INV, desto längre utpulser och vice versa. Signalen från spänningsdelaren i återkopplingskretsen från utgången är ansluten till den. Därefter kopplas den icke-inverterande ingången NONINV till den gemensamma ledningen - GND.
EAOUT eller Error Amplifier Output rus. Fel på förstärkarens utgång. Trots att det finns felförstärkaringångar och med deras hjälp kan du i princip justera utgångsparametrarna, men regulatorn reagerar på detta ganska långsamt. Som ett resultat av ett långsamt svar kan kretsen bli exciterad och misslyckas. Därför tillförs signaler från detta stift via frekvensberoende kretsar till INV. Detta kallas även felförstärkarfrekvenskorrigering.

Exempel på riktiga enheter
För att konsolidera informationen, låt oss titta på några exempel på typiska PWM-kontroller och deras anslutningskretsar. Vi kommer att göra detta med exemplet med två mikrokretsar:
TL494 (dess analoger: KA7500B, KR1114EU4, Sharp IR3M02, UA494, Fujitsu MB3759);
De används aktivt. Dessa nätaggregat har förresten avsevärd effekt (100 W eller mer på 12V-bussen). Används ofta som donator för omvandling till ett laboratorienätaggregat eller en universell kraftfull laddare, till exempel för bilbatterier.
TL494 - recension
Låt oss börja med det 494:e chippet. Dess tekniska egenskaper:



I det här specifika exemplet kan du se de flesta av resultaten som beskrivs ovan:
1. Icke-inverterande ingång för den första feljämföraren
2. Invertering av ingången för den första feljämföraren
3. Återkopplingsingång
4. Ingång för justering av dödtid
5. Uttag för anslutning av extern tidskondensator
6. Utgång för anslutning av tidsmotstånd
7. Gemensam stift på mikrokretsen, minus strömförsörjning
8. Kollektorterminal på den första utgångstransistorn
9. Emitterterminal på den första utgångstransistorn
10. Emitterterminal på den andra utgångstransistorn
11. Kollektorterminal på den andra utgångstransistorn
12. Matningsspänningsingång
13. Ingång för val av enkelcykel eller push-pull driftläge för mikrokretsen
14. Inbyggd 5 volts referensutgång
15. Inverterande ingång för den andra feljämföraren
16. Icke-inverterande ingång för den andra feljämföraren
Bilden nedan visar ett exempel på en datorströmförsörjning baserad på detta chip.

UC3843 - recension
En annan populär PWM är 3843-chippet - dator och andra strömförsörjningar är också byggda på den. Dess pinout är belägen lägre, som du kan se har den bara 8 stift, men den utför samma funktioner som den tidigare IC.
Intressant:
Det finns UC3843 i ett fodral med 14 ben, men de är mycket mindre vanliga. Var uppmärksam på markeringarna - ytterligare stift är antingen duplicerade eller används inte (NC).

Låt oss dechiffrera syftet med slutsatserna:
1. Ingång för komparator (felförstärkare).
2. Återkopplingsspänningsingång. Denna spänning jämförs med referensspänningen inuti IC.
3. Strömsensor. Den är ansluten till ett motstånd mellan krafttransistorn och den gemensamma ledningen. Behövs för överbelastningsskydd.
4. Timing RC-krets. Med dess hjälp ställs driftsfrekvensen för IC in.
6. Avsluta. Styrspänning. Anslutet till transistorns gate finns här ett push-pull-utgångssteg för att styra en enkeländad omvandlare (en transistor), vilket kan ses i figuren nedan.
Buck, Boost och Buck-Boost typer.
Ett av de mest framgångsrika exemplen är kanske den utbredda mikrokretsen LM2596, på grundval av vilken du kan hitta många omvandlare på marknaden, som visas nedan.

En sådan mikrokrets innehåller alla tekniska lösningar som beskrivits ovan, och även istället för ett slutsteg på lågeffektomkopplare har den en inbyggd strömbrytare som kan motstå en ström på upp till 3A. Den interna strukturen för en sådan omvandlare visas nedan.

Du kan vara säker på att det i huvudsak inte finns några speciella skillnader från de som diskuteras i den.
Men här är ett exempel på en sådan styrenhet, som du kan se finns det ingen strömbrytare, utan bara en 5L0380R mikrokrets med fyra stift. Det följer att i vissa uppgifter behövs helt enkelt inte de komplexa kretsarna och flexibiliteten hos TL494. Detta gäller för strömförsörjningar med låg effekt, där det inte finns några speciella krav på brus och störningar, och utgångsrippeln kan undertryckas med ett LC-filter. Detta är en strömkälla för LED-strips, bärbara datorer, DVD-spelare, etc.

Slutsats
I början av artikeln sades det att en PWM-kontroller är en enhet som modellerar medelspänningsvärdet genom att ändra pulsbredden baserat på signalen från återkopplingskretsen. Jag noterar att namnen och klassificeringarna för varje författare ofta är olika, ibland kallas en PWM-styrenhet en enkel PWM-spänningsregulator, och familjen av elektroniska mikrokretsar som beskrivs i den här artikeln kallas "Integrerat delsystem för pulsstabiliserade omvandlare." Namnet förändrar inte essensen, men dispyter och missförstånd uppstår.
Foto av generatorn.

Vad kan denna generator göra? Låt oss ta en titt på parametrarna.
- Driftspänning: 3,3 - 30V;
- Generationsfrekvens: 1Hz - 150KHz;
- Frekvensgenereringsnoggrannhet: 2%;
- Belastningseffekt: 5…30mA;
- Amplituden för utsignalen är lika med matningsspänningen;
- Omgivningstemperatur: -20 … +70 °C.

Endast 2 nummer med 3 siffror vardera kan visas. Den nedersta raden visar PWM-driftcykeln i procent och den översta raden visar frekvensen. Frekvensen visas enligt följande regler:
- XXX, 1Hz steg, område 1 – 999Hz;
- X.XX, steg in 0,01 kHz, i intervallet 1,00 - 9,99 kHz;
- XX.X, steg in 0,1 kHz; inom intervallet 10,0 - 99,9 kHz;
- X.X.X, 1 kHz steg; i intervallet 100 - 150 kHz.
Displayen styrs av HT1621B-chippet, displayen är universell, den innehåller de symboler som krävs för att bygga en termometer, hygrometer, voltmeter, amperemeter och wattmeter, men i vårt fall används de inte. Skärmen har en klarblå bakgrundsbelysning. Förresten noterar jag att displayen på min generator visade sig vara sjaskig, som om den hade tagits bort någonstans.

Generatorns huvudchip är STM8S003F3P6 mikrokontroller. Och eftersom denna mikrokontroller har EEPROM-minne, sparas inställningarna när den stängs av.
Du kan styra generatorn på två sätt: knappar och via UART. Allt är tydligt med knapparna, ett par knappar styr frekvensen, det andra driftcykeln. Men med UART är allt mycket mer intressant. Datautbyte måste ske med följande parametrar:
- 9600 bps Databitar: 8
- Stoppbit: 1
- Kontrollsiffra: ingen
- Flödeskontroll: ingen
För att ställa in genereringsfrekvensen måste du skicka frekvensen som den visas på displayen genom att lägga till bokstaven F framför frekvensvärdet. För att till exempel ställa in frekvensen till 100 Hz måste du skicka F100, för 105 kHz - F1.0.5, för 10.5 kHz - F10.5 och så vidare.
För att ställa in driftcykeln måste du skicka ett tresiffrigt driftcykelnummer genom att lägga till bokstaven D framför det. Till exempel D050, D100, D001.
Om ett korrekt kommando skickas kommer generatorn att svara NED, om ett felaktigt - FALL. Men det finns ett MEN, jag kunde aldrig konfigurera arbetet med generatorn via UART.
Jag bestämde mig för att testa generatorn med en logisk analysator. Detta är vad som hände.
Frekvens 1 Hz, arbetscykel 1 %. Som vi kan se är felet fortfarande litet.

Frekvens 1 Hz, arbetscykel 50 %.

Frekvens 1 Hz, arbetscykel 99 %.

Frekvens 1 kHz, arbetscykel 1 %.

Frekvens 1 kHz, arbetscykel 50 %.

Frekvens 1 kHz, arbetscykel 99 %. Här ser vi att med arbetscykeln inställd på 99 % är fyllningen faktiskt 100 %.

Frekvens 1 kHz, arbetscykel 91 %. Jag började minska arbetscykeln, och upp till 92% var fyllningen 100%, och först vid 91% förbättrades situationen.

Frekvens 50 kHz, arbetscykel 1 %. Som du kan se är det bara 0,2% istället för 1%.

Frekvens 50 kHz, arbetscykel 50 %. Här skiljer det sig med 1 %.

Frekvens 50 kHz, arbetscykel 99 %. Och även här är avvikelsen -1%.

Frekvens 100 kHz, arbetscykel 1 %. Men det finns inget här ännu.

Frekvens 100 kHz, arbetscykel 2 %. Och vid 2% visas signalen, men i själva verket är fyllningen 0,4%.

Frekvens 100 kHz, arbetscykel 50 %. Avvikelsen är nästan -2%.

Frekvens 100 kHz, arbetscykel 99 %. Och här är det nästan -1%.

Frekvens 150 kHz, arbetscykel 1 %. Ingen signal igen.

Frekvens 150 Hz, arbetscykel 3 %. Och signalen visas bara vid 3%, men fyllningen är 0,6%.

Frekvens 150 kHz, arbetscykel 50 %. Men i själva verket är fyllningen 46,5 %, en skillnad på -3,5 %.

Frekvens 150 kHz, arbetscykel 99 %. Och det finns ett fel, men bara 1,5%.

Provet är ganska grovt, men forskningen är inte över än. Jag bestämde mig för att mäta arbetscykeln vid olika arbetscykler (5% steg) och vid olika frekvenser (25 000 Hz steg) och lägga dem i en tabell.
Den enklaste generatorn av pulsbreddssignaler.
Huvudsyftet med PWM Generator-programmet är att generera pulsbreddsmodulationssignaler i realtid. Dessa toner genereras baserat på specificerade värden för frekvens (i Hertz), arbetscykel - förhållandet mellan tid mellan låga och höga tillstånd för signalen (i procent) och amplitud - nivån på den digitala signalen (i dBFS) . Alla ovanstående parametrar kan omedelbart ändras under drift. Den maximala möjliga signalnivån som genereras är 0 dBFS, och den högsta frekvensen är halva samplingsfrekvensen. En hel meny med utgångsegenskaper tillhandahålls för att konfigurera ljudgenereringen till den optimala kvalitetsnivån. Det finns möjlighet att ändra antalet och storleken på interna databuffertar, samplingsfrekvens och kvantisering.
Programvaran kan användas för att skapa kontrolltoner för olika elektriska och elektromekaniska enheter. I synnerhet används den resulterande PWM-signalen, hämtad från utgången från ljudkortet på en persondator och passerad genom en standardljudförstärkare, för att styra motorer, fläktar och belysningsenheter.
PWM Generator stöder arbete med flera ljudkort, och du kan välja det som ska användas för att mata ut den önskade signalen (som standard fungerar programmet med den utenhet som anges i Windows Kontrollpanel). Det är värt att notera att den fungerande PWM-signalen kan sparas som en WAV-fil och sedan lyssnas på med standardprogramvara. Och om du regelbundet använder vissa toner, gör PWM-signalgeneratorn det möjligt att spara (och ladda) dem som förinställningar. Dessutom följer flera förinställningar med appen.
PWM Generator stöder alternativet att synkronisera alla körande instanser av programmet, så att du kan generera flera toner samtidigt. Det bör noteras att programvaran kan köras i bakgrunden, vilket gör att användare kan byta uppmärksamhet till andra applikationer. Dessutom kan PWM Generator styras med hjälp av skriptkommandon, såväl som genom Windows Messaging-system.
Författarna rapporterar att ju snabbare arbetsstationen är, desto högre ljudkvalitet och känslighet för kontrollerna när man spelar upp toner.
Ansökan i fråga skrevs av anställda på det tyska företaget Esser Audio. Denna organisation är engagerad i skapandet och distributionen av mjukvaruprodukter (etc.), främst avsedda för att testa och testa ljudutrustning. Program från Esser Audio kännetecknas av bra funktionalitet och ett extremt enkelt gränssnitt.
PWM Generator-programmet är shareware, testversionen låter dig fritt starta och testa applikationen under de första trettio dagarna. Kostnaden för programmet för länder utanför Europeiska unionen är 14 euro, för de inom Europeiska unionen - 16,66 euro (på grund av tillägg av moms). En rabatt ges vid köp av flera licenser.
Applikationen distribueras på engelska och tyska. Hjälpfilen innehåller en detaljerad beskrivning av programvarans alla funktioner, och ett onlinehjälpforum har skapats för att ge ytterligare support till användare av programpaketet. Det finns ingen rysk version av PWM Generator ännu.
Den senaste versionen av programvaran fungerar på alla datorer med ett 32- eller 64-bitars Microsoft Windows-operativsystem (9x, NT, 2000, 2003, XP, Vista, 7, 8) och ett ljudkort.
Programdistribution: shareware 14 euro. Det finns en testversion (30 dagar)
Lysdioder används i nästan all teknik runt omkring oss. Det är sant att ibland blir det nödvändigt att justera deras ljusstyrka (till exempel i ficklampor eller bildskärmar). Den enklaste vägen ut i denna situation verkar vara att ändra mängden ström som passerar genom lysdioden. Men det är inte sant. Lysdioden är en ganska känslig komponent. Att ständigt ändra mängden ström kan avsevärt förkorta dess livslängd, eller till och med bryta den. Det är också nödvändigt att ta hänsyn till att du inte kan använda ett begränsande motstånd, eftersom överskottsenergi kommer att ackumuleras i den. Detta är oacceptabelt när du använder batterier. Ett annat problem med detta tillvägagångssätt är att ljusets färg kommer att ändras.
Det finns två alternativ:
- PWM-reglering
- Analog
Dessa metoder styr strömmen som flyter genom lysdioden, men det finns vissa skillnader mellan dem.
Analog styrning ändrar nivån på strömmen som passerar genom lysdioderna. Och PWM reglerar frekvensen av strömförsörjningen.
PWM-reglering
En väg ut ur denna situation kan vara att använda pulsbreddsmodulering (PWM). Med detta system får lysdioderna den erforderliga strömmen och ljusstyrkan justeras med hjälp av högfrekvent strömförsörjning. Det vill säga, frekvensen av matningsperioden ändrar ljusstyrkan på lysdioderna.
Den otvivelaktiga fördelen med PWM-systemet är att upprätthålla produktiviteten hos LED. Verkningsgraden blir cirka 90 %.
Typer av PWM-reglering
- Tvåtrådig. Används ofta i bilbelysningssystem. Omvandlarens strömförsörjning måste ha en krets som genererar en PWM-signal vid DC-utgången.
- Shuntanordning. För att göra på/av-perioden för omvandlaren använd en shuntkomponent som ger en annan väg för utströmmen än lysdioden.
Pulsparametrar för PWM
Pulsrepetitionshastigheten ändras inte, så det finns inga krav på den för att bestämma ljusets ljusstyrka. I det här fallet ändras bara bredden eller tiden för den positiva pulsen.

Pulsfrekvens
Även med hänsyn till att det inte finns några särskilda klagomål på frekvensen finns det gränsvärden. De bestäms av det mänskliga ögats känslighet för flimmer. Till exempel i en film måste bildrutor blinka med 24 bilder per sekund för att våra ögon ska uppfatta det som en rörlig bild.
För att flimrande ljus ska uppfattas som enhetligt ljus måste frekvensen vara minst 200 Hz. Det finns inga begränsningar för de övre indikatorerna, men det finns inget sätt lägre.
Hur fungerar en PWM-regulator?
Ett transistornyckelsteg används för att direkt styra lysdioderna. Vanligtvis använder de transistorer som kan ackumulera stora mängder effekt.
Detta är nödvändigt när du använder LED-remsor eller högeffekts-LED.
För små kvantiteter eller låg effekt räcker användningen av bipolära transistorer. Du kan också ansluta lysdioder direkt till mikrokretsar.
PWM generatorer
I ett PWM-system kan en mikrokontroller eller en krets bestående av lågintegrationskretsar användas som en masteroscillator.
Det är också möjligt att skapa en regulator från mikrokretsar som är designade för att byta strömförsörjning, eller K561 logikchips, eller NE565 integrerad timer.
Hantverkare använder till och med en operationsförstärkare för dessa ändamål. För att göra detta är en generator monterad på den, som kan justeras.
En av de mest använda kretsarna är baserad på 555-timern. Det är i huvudsak en vanlig fyrkantsvågsgenerator. Frekvensen regleras av kondensatorn C1. vid utgången måste kondensatorn ha hög spänning (detta är samma sak med anslutningen till den positiva strömkällan). Och den laddas när det är låg spänning vid utgången. Detta moment ger upphov till pulser med olika bredd.
En annan populär krets är PWM baserad på UC3843-kretsen. i detta fall har omkopplingskretsen ändrats mot förenkling. För att styra pulsbredden används en styrspänning med positiv polaritet. I detta fall producerar utgången den önskade PWM-pulssignalen.
Reglerspänningen verkar på utgången enligt följande: när den minskar, ökar bredden.

Varför PWM?
- Den största fördelen med detta system är dess lätthet. Användningsmönstren är mycket enkla och lätta att implementera.
- PWM-kontrollsystemet ger ett mycket brett utbud av ljusstyrkajusteringar. Om vi pratar om bildskärmar är det möjligt att använda CCFL-bakgrundsbelysning, men i det här fallet kan ljusstyrkan bara minskas med hälften, eftersom CCFL-bakgrundsbelysning är mycket krävande för mängden ström och spänning.
- Med PWM kan du hålla strömmen på en konstant nivå, vilket innebär att lysdioderna inte kommer att skadas och färgtemperaturen inte ändras.
Nackdelar med att använda PWM
- Med tiden kan bildflimmer bli ganska märkbar, särskilt vid låg ljusstyrka eller med ögonrörelser.
- Under konstant starkt ljus (som solljus) kan bilden bli suddig.