Изобретението се отнася до областта на радио инженеринга, а именно за радиоконтролови системи за определяне на координатите на местоположението на източниците на радио емисии (IRI). Достигнатият технически резултат е намаление на хардуерните разходи. Предложеният метод се основава на приемането на сигналите на IRI Antensas, измерване на времето на приемане от IRI в няколко точки на пространството чрез сканиране на радиоприемници, трансформирани в система от уравнения, както и на базата на използването на две идентични , стационарни стълбове на радиоуправлението (RP), едното от които се приема за олово чрез свързване с различна линия на комуникация, докато калибрира измервателния уред за забавяне на приемането на сигнали до (RP), като се използват референтни радио електронни инструменти ( RES) с известни сигнални параметри и координати на местоположението, след това в RP се извършват квазисинхронно сканиране и измерване на нивата на сигнала при дадени фиксирани честоти. И величината на заминаването на пристигането на IRI сигналите. Информацията от робския RP се предава на оловото, където се изчисляват нивата на нива и разликата в депозирането на пристигането на сигналите на IRE, като се вземат предвид резултатите от калибрирането на измервателите и също съставляват две уравнения на Позицията на IRI, всеки от които описва кръг с радиус, равен на разстоянието от RP до IRY. Разстоянията се определят чрез съотношението на нивата на сигнала и разликата във времето на получаване на сигнала, измерен върху RP, използвайки само един двойка антени с известния азимут на основната венчелистна ос и радиационен модел, основния венчелистче на всеки от тях която се намира в различни полу-равнини спрямо основната линия, и координатите на IRI определят числовия метод за решаване на съставните уравнения, като се вземат само корените само на половината равнина, в която Основен венчелистче на антена с най-високо ниво на получения сигнал е. Устройството, прилагащо метода, съдържа два идентични RPs, една от които е водещата, а на всяка пост съдържа насочени антени, измервателното сканиране радио, измервателното забавяне на пристигането на сигналите, компютъра и комуникационното устройство по определен начин, в определен начин . 2 n.p. F-LS, 2 ил.
Цифри за патента на Руската федерация 2510038
Изобретението се отнася до областта на радио инженеринга, а именно на радиоконтролови системи за определяне на координатите на местоположението на източниците на радио емисии (IRI), информация за която не е налична в базата данни (например държавна радиочестотна услуга или наблюдение на обществената услуга обслужване). Изобретението може да се използва при търсене на местоположението на неразрешени средства за комуникация.
Има методи за определяне на координатите, при които пасивните насоки за насочване се използват в количество от най-малко три, центърът на тежестта на пресечната точка на идентифицираните азимути от които към предната част на пристигането на вълната се взема за оценката на местоположението. Основните принципи на такива забатели са амплитудни, фази и интерферометрични. Методът на амплитудата на пелената е широко използван, който използва антенна система, имаща фокусна диаграма с изразено максимално основно венчелистче и минимални задни и странични венчелистчета. Такива антени системи включват, например, Legolariodic или антени, имащи кардиоидна характеристика и т.н., с амплитуден метод, положението на антената се постига чрез механично въртене, при което изходният сигнал има максимална стойност. Такава посока се приема за посоката на IRI. Недостатъците на повечето насоки за насочване включват висока степен на сложност на антените, превключващи устройства и наличието на многоканални радио приемници, както и необходимостта от високоскоростни системи за обработка на информация.
Наличност Б. федерални области Държавната радиочестотна услуга, свързани чрез централната точка на разклонената мрежа от радиоуправляеми длъжности, оборудвани със средства за получаване на радиосигнали, измервания и обработка на техните параметри, ви позволява да допълвате техните функции и цели за определяне на координатите на местоположението на тези IRI, \\ t Информация за това не е налична в базата данни, без да се прибягва до използването на сложни и скъпи насоки.
Известен е метод, в който n, най-малко четири, стационарни радиопомни контролни публикации, разположени не на една права линия, се използват за определяне на координатите на местоположението, един от които е взет за базата, свързваща се с останалите N-1 постове в Всички публикации, квазисинхронно сканиране съгласно посочените фиксирани честоти на настройката, осредняват измерените стойности на сигналите на всяка от сканираните честоти, и след това в основната публикация за всеки от C4 N комбинации (комбинации от n до 4) въз основа на обратната страна на пропорционалната зависимост на далечните отношения от длъжността до източника на радио емисии и съответните разлики на нивата на сигнала, изразени в DB, \u200b\u200bса три уравнения, като всеки от които описва кръга от равни отношения, \\ t Според параметрите на две парни двойки и определят текущата средна стойност на географската ширина и дължина на местоположението на радио емисиите. Недостатъкът на този метод е голям брой стационарни стълбове на радиоконтрол.
Известни методи и устройства за забавяне (4, 5), които могат да бъдат използвани за определяне на координатите.
Метод (4) се основава на приемането на сигналите с три антени, образуващи два двойки измервателни бази данни, измерване на разликите в времето на пристигане на IRI сигналите и детерминистичните изчисления на желаните координати.
Недостатъците на метода следва да включват:
1) голям брой антени.
2) Методът не е фокусиран върху използването на радиоконтални стълбове.
3) Измерване на бази за изчисляване на разликата в времето на пристигането на сигналите по двойки антени значително ограничават разпространението на тези антени, да не говорим за нецелесъобразността и голямата техническа сложност на изпълнението на метода.
Отделената разлика-състезателна посока (5), състояща се от две периферни точки, централната и системата от едно време, има за цел да разтоварва комуникационния канал между артикулите. Периферните точки са предназначени за приемане, съхранение, обработка на сигнали и предаване на знаци на процесора, които изчисляват разликата в времето на пристигане на сигнала. В системата на един път се използва хронизатор, който е прикрепен към еднократна скала от текущия времеви мащаби (часовник), предназначен да свързва нивото на сигнала за записване на стойността на времето за приемане.
На тази посока са характерни следните недостатъци:
1) не са адаптирани към радиоконтролерите, използвани в клоновете на федералните области на държавната радиочестотна услуга или услугата за надзор на държавната комуникация.
2) Голям брой специализирани посоки (но не и радиооцендни) публикации.
3) неразумно и не разкрито (поне преди функционалната схема), използването на една времева система на процесора и хронизаторите на PP синхронизирана със системата от един път.
4) необходимостта от наличие на радиоканали с голям производителност (до 625 mBodes) за прехвърляне на дори фрагменти от сигнали с PP1 и PP2 на процесора.
5) За организирането на радиоканала са необходими радиопредални устройства и получават разрешение за работа при определени условия на работа.
Известен е дестилен метод за определяне на координатите на източника на радио емисии и неговото прилагащо устройство (6).
Метода, базиран на приемането на IRI сигналите с четири антени, образуващи три независими измервателни бази, в отделените точки А, В, С, D, така че обемът на фигурата, оформен от тези точки, повече нула (Va, B, C, D\u003e 0). Сигналът се приема едновременно за всички антени, трите независими времеви разлики t AC, T BC, T DC сигнална приемаща параметри на антените, образуващи измервателната антенна бази (AC), (Sun) и (DC). Съгласно измерените различия, времето изчислява разликите между диапазона от IRI към двойки точки (a, c), (b, в), (d, в), за к-мо пътуването на антени, намиращи се в точки А , B, c \u003d 1, b, c, d при k \u003d 2, d, c, a for k \u003d 3, се изчисляват, като се използват измерените разстояния на обхвата на ъгъла k, характеризиращи ъгловото положение на положението на. \\ T Положение на IRI K, K \u003d 1, 2, 3 по отношение на съответната измервателна база и координати на точката f k собственост на k-th Позицията на самолетите на IRI, изчисляват желаните IRI координати като координати на точките на пресичане на трите равнини на позицията на IRI K, K \u003d 1, 2, 3, всеки от които се характеризира с координатите на точките местоположение K-Th Войските на антените и изчислените ъгли на ъгъла k и координатите на точката F K, отразяват резултатите от изчисляването на координатите на IRI в даден формат.
Този метод и устройство, неговата реализация, по-близо до претендираната, но също така има редица значими недостатъци:
1) сложността на практическото прилагане на метода поради липсата на възможността за измерване на разликите в времето за приемане на сигнала само от антените (няма измервателни радио приемници в схемата).
2) Необходимостта от информацията за сигналите на IRI от EMD на антените, разположени до 0.6-0.7 R към оптималното разстояние съгласно (2) до една точка, което е невъзможно практически да приложи.
3) Уверете се, че измерването на времето на получаване на IRI сигнала на определени специфични честоти директно от антените (без използването на радиоприемници, които не се показват на схемата) са много трудни.
4) за измерване на времето на приемане на време, двупосочни метри се използват директно от антените.
5) сложността на техническото изпълнение поради голям брой различни калкулатори.
6) несигурност при изграждането на повърхността на позицията под формата на равнина, перпендикулярна на равнината на антените, тъй като антените в точките А, В, С, D не се намират в една и съща равнина, както се вижда от Състояние VA, B, C, D\u003e 0 в претенциите.
Най-близкият до заявения метод на Rangefinder и разликата за определяне на координатите на източника на радио емисии и неговото реализиращо устройство (7), прието като прототип.
Методът се основава на приемането на сигнала с три антени, измервайки стойностите на две разлики на сигнала за приемане на антените на IRI, измерване на двете стойности на плътност на стойността на потока на сигнала на IRI, следвайте обработката на резултатите от измерването За да се изчислят координатите на точките, чрез които минава линия за позицията на IRI.
Този метод включва следните операции:
Има три антени в върховете на ABC триъгълника;
Вземете сигнал за всичките три антени;
Измерват се двете разлики от времето t AC и T BC сигнален прием на IRI антени;
Измерване на плътността на мощността P 1 и P 2 на сигнала в точката на поставяне на антени 1 и 2;
Изчислете стойностите на дестилационните разлики от IRI към двойки антени с експресии Rc \u003d Ct AC, R BC \u003d CT BC, R ab \u003d R AC-R BC, където С е скоростта на разпространение на електромагнитната вълна Шпакловка
Изчислете координатите на получената формула.
В съответствие с (7) устройството за прилагане на метода включва:
Три антени;
Два времемерна разлика;
Две измервател на потока на захранването;
Изчислителна единица;
Дисплей.
Прототипът се характеризира със следните недостатъци:
1) практическата сложност на прилагането на метода поради липсата на възможност за измерване на разликите в времето на приемане на сигнала само от антените (няма измерване на радио и радио колекции).
2) Необходимостта от информацията за сигналите на Ire от антените, разположени на няколко километра до една точка, за да се измери два пъти метра, което е значимо и не е решено от патента по проблема.
3) не са адаптирани към оборудването на радиоуправляемите стълбове (излишни двумерни измервателни уреди, измервателен уред за плътност на захранването, изчислителна единица, индикатор), налични в клоновете на федералните области на радиочестотната услуга на RF и следователно не могат да бъдат използван там.
4) Приложимите приемни антени могат да бъдат само изотропични, тъй като във формулите на координатните формули няма параметри на диаграмите на тяхната посока.
Целта на настоящото изобретение е да разработи метод за определяне на координатите на местоположението на IRI от две радиооцендни стълбове, което ще позволи да се прилага такъв метод в почти всички клонове на федерални области на радиочестотната служба на Руската федерация.
Тази цел се постига, като се използват симптомите, посочени в изобретението, които са общи с прототипа: метод за определяне на координатите на местоположението на източниците на радио емисии въз основа на приемането на антените на IRI, измерване на нивата и разликата в момента на получаване на сигнал от IRI в няколко точки на пространството чрез сканиране на радиоприемници и трансформира в системните уравнения, отличителни черти: за определяне на координатите на местоположението на IRI, използвайте две идентични стационарни стълбове за радио управление, едно от които се приема за олово, свързващо Друга линия на комуникация, калибриране на измервателния размер на размера на приемането на сигнали за публикуване, използвайки референтни референции с известни сигнали и параметри на местоположението и координати, след това на публикации се извършват чрез квазисинхронно сканиране и измерване на нивата на сигнала на определените фиксирани честоти на корекция и прилежането на приемането на сигнали, когато и след това ги предават на базовия пост, когато се изчисляват съотношението на нивото и разликите Възраст на пристигането на сигналите на Ire, като се вземат предвид резултатите от калибрирането на измервателните уреди, и съставляват две уравнения на IRI позицията, всеки от които описва кръг с радиус, равен на разстоянието от длъжността до inire, и тези Разстоянията се определят чрез съотношението на нивата на сигнала и времето на получаване на времето, измерено при длъжности, използвайки само един двойка антени с известен азимут на основната венчелистна ос и радиационна диаграма, и координатите на IRI се определят от цифровия метод за решаване на съставните уравнения. Методът на изобретението е илюстриран от чертежите, показващи:
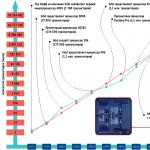
Фигура 1 - поставянето на две длъжности на радиоконтрол и позицията на IRI, e - истинската позиция, еф - фиктивна; A, B - ъглите на позицията на основния венчелистче на дъното; AB - основната линия; AE, бъдете - азимут А и Б линиите на истинската позиция на IRI; Aseuf, Wef - Azimuth линии и BF на фиктивни IRI;
Фигура 2 е блокова диаграма на изпълнението на предложения метод, \\ t
Предложеният метод включва следните операции:
1) Калибрирайте измервателния уред за забавяне на приемането на сигнали (IVZ) към публикации, като използвате рецепта от референтни референции с известни сигнали и координати на местоположението. Всяко референтно решение трябва да бъде в Зона на ЕМД на двата длъжности. Тяхното количество и разпространение в зоната на ЕМД трябва да бъде достатъчно, за да се гарантира посочената точност на калибриране като разстояние и азимут от публикации.
2) Във всяка публикация нивата на сигнала се измерват с помощта на радиоприемник и частта от пристигането на IRY сигналите, използвайки съответния измервателен уред, като се използва публичната антена с добре позната ориентационна диаграма, като същевременно възстановяват приемника към посочените фиксирани честоти. Процедурата за измерване на забавянето на пристигането на сигналите IRI се извършва подобно на параграф 1. Резултатите се записват в банка данни на компютъра.
3) Ние сме изпратени в комуникационната комуникационна канална информация от задвижвания компютър до водещия.
4) Изчислете разликата в депозирането на пристигането на сигналите на дисплея от референтните RES и от IRE, като се вземат предвид резултатите съгласно претенция 1 и също така изчисляват съотношението на нивата на сигнала от IRE, измерени чрез радио приемници.
5) съставляват система от две уравнения, определящи позицията на IRI и го разрешават с цифров метод, използвайки данните от параграф 4.
Уравненията на ситуацията ще имат изглед на кръговете
къде: R a, R b е разстоянието от стълбовете до желаната IRI и 8-та разлика (фиг. 1).
Квадрати на Radii отношения Ние пишем чрез измерените нива на сигнали като
Съотношението на квадратите на разстоянието, определено от разликата в нивата на сигналите, измерени на стълбовете на радиоконтрол А и В и се експресират в dB, дава възможност да се опише линията на позицията, като изключва зависимостта на тази позиция на. \\ T позиция от силата на източника на радио емисии. В този случай, от (3), въз основа на изчислената разлика на разстоянията, квадратите на разстоянието се определят:
 и
и  .
.
Тъй като кръговете се пресичат в две точки, симетрични по отношение на основната линия (виж фигура 1), след това се случва двусмислието на координатите на IRI. За да премахнете възникващата двусмислие, можете да повторите измерванията, като използвате посока (от известно дъно), например, логоероидна или сърдечно ротационни антени. Но тази опция е свързана с големи времеви разходи и сложността на автоматизацията на такова решение. В претендирания метод, дефиниционните координати с едновременно премахване на неяснотата се извършват чрез измерване на нивата на сигнала директно към насочващите антени. В същото време, посочените антени не се завъртат в посока на максималния от емитирания сигнал, но трябва да бъде известен позицията на оста на основния си венчелистче върху двете длъжности, а венчелистчетата са ориентирани към противоположните насоки спрямо база. Тази позиция на осите на основните венчелистчета на антените е показана на фиг. Зависимостта на EDC на изхода на антената e () е свързана със силата на полето близо до нея и ъгъла, определящ позицията на оста на основния венчелистче на дъното по отношение на азимута в случая, може да бъде представена като E () \u003d em (), където е максималният ЕМП, съответстващ на посоката на ос на основния венчелистче към източника, () - функцията, определяща антенна диаграма. Сега съотношението на нивата на сигнала за насочените антени n (a, b) могат да бъдат представени чрез съотношението на нивата, получени от неподвижните антени n AB, както където
 и
и  - функционална функция.
- функционална функция.
От тук n ab \u003d n (a, b) / (a, b) и квадратите на радиуса (4) на системата (1) ще бъдат представени във формата:
За да се реши системата от уравнения (1) и (2), като се вземат предвид (5) и (6), е необходимо да се определят ъглите A, B и да знаят (). От фигура 1 те се дефинират като a \u003d a - a, b \u003d b - b,  ,
, 
където: af \u003d af - a, bf \u003d bf - b, a< /2, то ИРИ находится во второй полуплоскости (ниже линии базы). При априорно снятой неопределенности расположения ИРИ относительно линии базы (например, при выполнении операции поиска ИРИ силовыми структурами) применяют ненаправленную (например, штыревую или биконическую антенны) и вычисление координат ведут по формулам (1), (2) с учетом (3) и (4).
Съставът на претендираното устройство, което изпълнява метода съгласно изобретението, включва два идентични радиоосални публикации - RCP A и RKP B, съдържащи:
1. антени 1, 6;
2. Радиоприемници (RP) 2, 7;
3. измервателни уреди на изоставащи сигнали (IVZ) 3, 8;
4. Компютри 4, 9;
5. Комуникационни устройства 5, 10.
Един от длъжностите (например, нека този пост RCP а) е водещ. Изходите на антени 1, 6 са свързани към входовете на сканиращите радио приемници 2, 7, контролни компютри 4, 9 са свързани чрез двупосочни връзки с комуникационно устройство 5, 10, предназначено за предаване на информация, сканиращи приемници 2, 7 и измерване на забавяне на пристигането на сигнали 3, 8, вход, всеки от които е свързан с изхода на съответния сканиращ приемник. Сигналите IRI се измерват чрез приемници от двупосочна комуникация към компютъра на съответната публикация. В блокове 3, 8, измерване на забавянето на сигналите на сигналите като референтно res, за да се създаде файл за калибриране, използван при изчисляването на координатите и IRI сигналите, и предаването на измерените стойности на искането на компютъра към неговата база данни се носи навън. Под контрола на главния пост, цялата информация от Slave Post се предава по комуникационния канал на комуникационното устройство 5, 10 към капитана на приемащата поща. Налице е изчисляване на координатите в зависимост от уравненията на позицията на IRI, като се вземат предвид диаграмите на радиацията на антените и калибровъчните файлове. Изчисленията на координатите се извършват с цифров метод за последователни приближения. Така предложеният метод позволява да се определят координатите на IRE за разлика от прототипа:
1) само две стационарни стълбове на радиоконтрол;
2) приемането на сигнала на IRI се извършва само за две антени;
3) насочените антени се използват с изразена максимала на радиационната таблица, а не с кръгов модел на ориентация;
4) Измерване на ламинирането на приемането на сигнали върху антените на длъжностите се извършва при поставяне на антените при текущия метър, като се използват директно неконфрираните и филтрирани сигнали от изходите на радио приемници Шпакловка
5) Изчисляване на разликата между измереното закъснение на приемането на пристигането на сигнала се извършва чрез измерване на не-два смуча, свързан към изхода на разредена антена, и на един компютър на главния пост, използвайки получените файлове с калибриране чрез измерване;
6) Основният венчелистче на всяка от антените се намира в различни полу-самолети спрямо основната линия. Вземането на истинските координати, свързани с полу-равнината по отношение на основната линия, в която е основният венчелистче на антената с най-високо ниво на получения сигнал.
7) Изчисляването на координатите на местоположението се извършва по числовия метод;
8) При априори-подвижна несигурност на местоположението на IRI по отношение на базовата линия се използва необработен (например, щифт или двуконната антена) и координатовото изчисление се извършва съгласно формули (1), \\ t (2), като се вземат предвид (3) и (4). Това опростява прилагането на устройството съгласно предложения метод.
Такива характеристики не са открити в аналози или в прототипа и показва наличието на признаци на новост и съответното ниво на изобретателност в предложеното изобретение.
Литература.
1. Korneev i.v., Lenzman v.l. и други. Теория и практика на държавното регулиране на използването на радиочестоти и ВЕИ на цивилната употреба.
Събиране на материали за повишаване на квалификацията на специалисти от радиочестотни центрове на федералните области. Книга 2. - SPB: SPBGUT. 2003.
2. Lipatnikov v.a., Соломатин A.I., Terentev A.V. Радиоклипове. Теория и практика. Spb. Вие, 2006 - 356 стр.
3. Методът за определяне на координатите на местоположението на източниците на радио емисии. Приложение № 2009138071, PUL. 04/20/2011 B.I. 11. Автори: Loginov Yu.i., Екимов ОВ, Рудаков Р.н.
4. Метод на различно състезание за излъчване на радио емисии. Патент RF № 2325666 C2. Автори: Saibel A.g., Сидоров стр.А.
5. Скоростна разлика Състезателна посока Finder. Патент на Руската федерация № 2382378, C1. Автори: Ivassenko A.v., Sibel A.g., Хохов П.Ю.
6. Метод за компресиране на разликата за определяне на координатите на източника на радио-емисии и прилагането му. RF Patent No. 2309420. Автори: Saibel A.g., Grishin P.S.
7. Намиране на диапазона и диференциален метод за определяне на координатите на източника на радио емисии и прилагането му. Патент на Руската федерация № 2363010, C2, Publ. 10/27/2007 Автори: Saibel A.g., Vaigel k.i
Иск
1. Метод за определяне на координатите на местоположението на източниците на радио емисии (IRI), базирани на измерване на нивата и разликата на времето на сигнала на сигнала от IRI към отделените антени чрез сканиране на радиоприемници и трансформирани в система от уравнения , характеризиращ се с това, че се използват две стационарни стълбове за радио контрол, единият от които се приема за хост, свързващ се с друга линия на комуникация, е калибриран измервателното забавяне на приемането на сигнали за публикуване на референтни радио електронни инструменти с известна сигнализация Координати на параметрите и местоположението, квазисинхронно сканиране за откриване на IRI и след това измерване на нивата на сигнала при посочените фиксирани честоти на настройките и забавяне на пристигането на сигналите на IRE, предават ги на водещия на длъжността, където нивата на нивата и разликата в заминаването на пристигането на сигналите на Ire се изчислява, като се използват резултатите от калибрирането на метри и също така съставляват две уравнения, всяка от които описва кръг с радиус, равен на разстоянието от длъжността до IRY, и тези разстояния се определят чрез съотношението на нивата на сигнала и разликата в закъснението на получаването на сигнала, измерени при постове, като се използва само един двойка антени с Известните азимутни оси на основните листни стъкла и фокус, главния венчелистче на всеки от всеки, който се намира в различни полу-равнини спрямо основната линия, и координатите на IRI се определят от числения метод за решаване на съставните уравнения, \\ t Вземането на истински координати, свързани с полу-равнината по отношение на основната линия, в която се намира основният венчелистче на антената с най-високо ниво на получения сигнал.
2. устройство за определяне на координатите на местоположението на източниците на радио емисии, съдържащи свързани чрез двупосочни линии на комуникация, публикации, включително приемащи антени, сканираща радио, задвижвана от компютър, характеризираща се с това, че съдържа два еднакви радиоконтролни пост, една от които е водеща и всеки постмер за забавяне на приемането на сигнали и изходите на антените са свързани към входа на сканиращите радио приемници, контролният компютър е свързан чрез двупосочни връзки с комуникационното устройство, сканиращия приемник и измервателния приемник и измервателния уред изоставането на приемането на сигнали, което е свързано с изхода на сканиращия приемник.
Копнеж, за да се определи местоположението и компонентите на вектора на скоростта на радиосигналите космически кораб Системите за сателитна радионавигация могат да се използват в космическата радио навигация и геодезия. Съгласно метода, устройството за приемане на N-канал, инсталирано на обекта, сигналите за сателитна навигация, определя диапазона от обекти към всеки сателит, като измерва времето на изместване на последователностите на кодовете, генерирани от сателитни генератори по отношение на последователността на кодовете, генерирани от генераторите на кодената , както и компонентите на вектора на скоростта чрез измерване на получените доплерови честотни смени, използвайки системи за проследяване на каране. В същото време, в N-каналното приемно устройство, едната от които е водещи, а другия - задвижвани канали, разликата в обхвата между диапазоните, измерените задвижвани устройства и диапазона, измерени чрез устройството за задвижване, също като определяне на разликите в скоростта на промяна на промените между скорости на промяна на диапазоните, изчислени върху измерванията на доплерчестотните промени от задвижващите приемни устройства и скоростта на промените в обхвата, изчислени за измерване на доплерческото превключване от устройството за задвижване, след това, тогава Определянето на двойните разлики между обхвата и двойните разлики в обхвата на диапазоните чрез взаимно изваждане един от друг на разликите в дестилацията и разликите в разликите в промените. Техническият резултат се състои в увеличаване на точността на определяне на координатите на местоположението, които представляват век на скоростта на определящия обект чрез навигационни сигнали на КРН; и използване на радиосигнали на източници на заземителни въздуха на радио емисии, както и използването на други системи и симулатор радио излъчване. 4 Z.P. F-LS, 3 ил.
Изобретението се отнася до областта на космическата радио навигация, геодезия и може да се използва за определяне на координатите на местоположението и компонентите на вектора на скоростта на обектите. Известна доплерова разлика и метод на графлосценция за определяне на координатите и компонентите на местоположението на вектора на скоростта на обекти, използващи навигационни радиосигнали на космическия сателитни радиовъглеви системи (SRN), въз основа на измервания на разликите в топотрични разстояния между обекта и две Позиции на същата навигация KA (NCA) в последователното време на времето (P.S. Волосов, Ю.С. Дубенко и др. сателитна навигация. Л.: Корабостроене, 1976). Практическо изпълнение Известният метод е руската SRNS "Цикада" и американския SRNS "Transit" - навигационните системи от първо поколение. В него интеграцията на доплезовия изместването на честотата, поета от интервала t от навигационния изкуствен сателит на Земята (NISA) на радиосигналите, ви позволява да определите броя на дължините на вълните, подредени в разликата в разстоянията от центъра за фаза на антената на приемащото устройство на обекта към две разпоредби на NISZ (две позиции на позициите на Центъра за фаза на антената NISZ:  където t 1 и t 2 - времето на предаване на времеви етикети NISS; R1 (t 1) и R2 (т2) - разстояния между фазовите центрове на антените на обекта и NISS; C е скоростта на светлината; F р - честота на получения сигнал; f o - честота на референтния сигнал, f n \u003d f и f и + f io + f tr + f g + f dd, където
където t 1 и t 2 - времето на предаване на времеви етикети NISS; R1 (t 1) и R2 (т2) - разстояния между фазовите центрове на антените на обекта и NISS; C е скоростта на светлината; F р - честота на получения сигнал; f o - честота на референтния сигнал, f n \u003d f и f и + f io + f tr + f g + f dd, където
f и - честотата на сигнала, излъчван от NISS;
f и - честота на нестабилност на излъчения сигнал;
f IO, F TR - неизвестни честотни смени, дължащи се на разпределението на сигналите в йоносферата, тропосферата;
f gr - неизвестна честотна промяна поради гравитационни сили;
f DR - неизвестни честотни смени, дължащи се на други фактори,
F o \u003d f и f + f o,
Където
f o е известна постоянна честота (честота);
f е нестабилността на честотата на референтния сигнал. Като се вземе предвид горното, изразът ще отнеме 
От израза е ясно, че интегралното доплерова честотно изместване се определя от два термина. Първият термин - грешки при измерването, причинени от условията за разпространение на радиовълни, гравитационното поле на Земята, нестабилността на радиационната честота на поддържащия генератор и други фактори. Те ще влязат в навигационно уравнение като неизвестно. Вторият термин е директно измерване на променянето на наклонения диапазон в дължини на вълните на референтната честота на определящия обект. Грешка при добавяне на система за проследяване на носача (SSR), която липсва в разглежданата навигация, също влиза в грешка при измерване на параметъра за радио навигация (RNP). Работа с време функция - носещата честота има ненулеви производни с висок ред. Следователно, в допълнение към случайни грешки (шум), действителният проследяващ контур с крайния ред да има динамични грешки, причинени от наличието на задвижващи механизми за по-висока поръчка от реда на системата. Намаляването на случайна грешка на фазовата автоматична настройка на честотата (FAPR) SSN изисква използването на по-инерционна верига обратна връзка (Стесняване на честотната честотна лента на филтъра), но в същото време динамичните грешки на SSR се увеличават и обратно. Изразяване на диапазона чрез координатите на правоъгълната геоцентрична координатна система, навигационното уравнение ще бъде под формата  ,
,
Където
X 1, Y 1, Z1, X 2, Y2, Z2 - координати на фазовия център на сателитната антена по време на Т2 и Т1, съответно;
x 0, Y 0, z 0 -nextricant координати на фазовия център на дефиниращия обект на антената. Както може да се види, три измерения на дестилационните разлики в четири последователни позиции на сателита в орбита ви позволяват да определите координатите на обекта x 0, y 0, z 0. В процеса на измерване е необходимо да се изчака до разстоянието до NISS промени в достатъчна стойност. Методът на разликата показва своите предимства на такива разстояния (бази) между разпоредбите на NISI в орбита, когато те са съизмерими с разстояния между NCA и дефиниращия обект. В съответствие с недостатъците на известния метод са
грешки, причинени от SSR;
грешки поради нестабилността на радиационната честота на NCA и генератора на поддръжката;
системни и случайни грешки;
Ниска точност на определяне на координатите на местоположението и компонентите на вектора на скоростта на обектите, когато се използва NISS на средни и високи орбити. Има и метод на Rangefall, който се приема като прототип. Практическото прилагане на този метод е второто поколение SRNS - Руската глобална система за навигация сатоплат (Glonass) и American Global позиционираща система (GPS). Геометричният еквивалент на крайния алгоритъм на този метод за решаване на проблема с навигацията е да се изградят сравнително използвани навигационни изкуствени спътници на земята (NISS) на набора от повърхностни повърхности, точка на пресичане на която е желаното положение на обекта (сателит) Радио навигационни устройства. / Ed. Vs Shebshaevich. М.: Транспорт, 1988). За да се реши проблемът с навигацията, минималното необходимо количество функционални зависимости трябва да бъде равно на броя на очакваните параметри. Определянето на координатите на обекта се намалява до решаване на системата на уравнения 
Където
R1 ,. . . , R4 е резултатите от измерванията на наклонени диапазони, получени при използване на системата за проследяване на закъснението (CVD);
x, y, z - обект координира в геометричната правоъгълна координатна система;
x 1, Y 1, z 1 .... x 4, y 4, z 4 - координатите на четири пътници, предадени в навигационното съобщение;
R t е разликата между истинския диапазон на сателитния обект и измереното, поради смяната на обектната времева скала спрямо времената на NISZ;
R1, ..., R 4 - Грешки при измерването, причинени от атмосферата, йоносферата, други фактори. За да се определят координатите на местоположението, е необходимо четири сателита да са едновременно в областта на оглед на обекта. В резултат на решаването на тази система на уравнения се определят четири известни: трите координати на местоположението на обекта (x, y, z) и корекцията r t към своя времева скала (да се изменят на часовника). По същия начин, използвайки резултатите от измерването, използвайки SSN, трите компонента на вектора и корекции на скоростта се определят с честотата на честотата на честотата на обекта, използвана за формиране на времевия мащаб:  ,
,
Където
- диапазон от промени в обхвата (радиални скорости), измерени с помощта на SSN;
- компоненти на вектора на скоростта на обекта;
- компоненти на вектора на скоростта на четири спътника;
- разликата между истинската скорост и измерена, поради несъответствието на честотата на честотата на честотата на NISF и обекта;
- Грешки при измерването, причинени от условията на разпространение на радиовълни и други фактори. Измерването на обхвата в оборудването на обекта се извършва чрез измерване на интервала между времето между времевите печати на кода, получен от сателита и локалния обектен код. Ефективност този метод Той се определя главно от шумовата грешка при измерване на RNP, тъй като това е шумовата грешка, която ограничава ефекта от компенсацията на силно оглавили грешки. За оценка на шумовата грешка (на борда сателитни радиовигационни устройства. / Ed. V.S. Shebshaevich. М.: Транспорт, 1988) Израз 
Където
2 W - измерване на шум;
- продължителността на елемента на обхвата;
C / N 0 - съотношението на сигналната мощност към спектралната плътност на шумовата енергия при входа на приемника;
B CVD - едностранна честотна лента на ССВ;
B Ако - едностранна честотна лента на дискриминатора на ОССЕ;
K 1, K 2 - постоянни параметри в зависимост от избраното техническо решение. Измерването на доплерователното превключване се основава на измерване на стъпките на обхвата на носещата честота, използвайки SSN. Оценката на измерването на точността на увеличаването на обхвата се определя от изразяването на фазовата дисперсия на 2 F на носителя на носителя с изглед 
Където
- дължина на вълната на превозвача;
B ssn - ширина на лентата на класацията на носача. Грешката на шума в увеличенията на измерванията на честотния носач е почти по ред на магнитуд минус грешка на дистриктни измервания, използвайки кодове за намиране на обхват. Регулиращият метод не позволява, например, поради разликите в SRNS Glonass и GPS, които трябва да се използват заедно. Така, недостатъците на известния метод, прототипът са
Грешки на системата за проследяване за забавяне на съотношението сигнал / шум;
Грешки на системата за проследяване на носител на сигнала / шума;
грешки, причинени от условията за разпространение на радиовълни в йоносферата, тропосферата и други фактори;
Грешки, причинени от смяна на времевата скала на обект спрямо мащаба на NISS поради нестабилността на честотите на сателитни генератори и основния генератор на обект;
Невъзможността за споделяне на източниците на радио емисионни системи с различни цели. За да се елиминира йоносферното закъснение в известни методи, се използва хардуерна компенсация, като се използват две честотни измервания и компенсация, като се използват корекции, изчислени от априори. Известният метод (прототип) се характеризира със следния набор от действия върху получените сателитни радиова навигационни сигнали:
получаването на N-канал за приемане на двучестотни радиосигнали N-NISS;
Определяне на обхвата от обекта към всеки сателит чрез измерване на времето на кодовите последователности, генерирани от сателитни генератори спрямо кодовата последователност, генерирана от генератора на обект;
измерване на стъпките на обхвата чрез измерване на стъпки на фази на превозвача;
Определяне на координатите на обекта;
Определяне на компонентите на вектора на скоростта на обекта. Целта на изобретението е да се увеличи точността на определяне на координатите на местоположението, които са век на скоростта на определящия обект съгласно навигационните радиосигнали на SRN и използване на радиосигнали на източници на заземяване на радиомиди, както и използване на други системи и техните симулатори. Целта се постига чрез факта, че съгласно предложения метод в приемното устройство N-канал, едното от които е водещи, а другият - задвижвани канали, разликата в обхвата между диапазоните, измерени от задвижващите приемни устройства, и. \\ T обхват, измерен чрез устройството за приемане на устройството, както и определянето на разликите в промените в обхвата между скоростите на промените в обхвата, изчислени от измерванията на доплерови честотни смени чрез задвижвани приемни устройства, и скоростта на обхвата, изчислена за измерване на доплеровата честота Чрез устройството за задвижване, след това да се постигне дефиниция на двойни разлики в разликите и двойни разлики в промените в обхвата чрез взаимно изваждане от приятел на далечни различия и разлики в скоростите на промените в обхвата. Допълнителни разлики Предложеният метод е следното. Водещите и приемните устройства, определянето на разликите в дестилацията са направени между обекта и две позиции на сателити, които се определят от измервателния интервал чрез измерване на стъпките на носителите на носителите, използващи фазови превозни средства на честотата на проследяващите системи на Навигационни радиосигнали на сателити. Определението за двойни диститали е направено между обекта и две позиции на сателити, които се определят от измервателния интервал, чрез измерване на разликата между честотните честоти на допар, получени от приемащите устройства, използващи квадратни фазови детектори, умножават средните им стойности измервателния интервал. Приемащото устройство на главния канал получава сигнали за симулатор на сателитен сигнал. Изборът на сигнала с доплерови честоти се произвеждат чрез ерекция на получените сигнали на квадрат, последвано от честотата се връща към желаното използване на честотни делители. Геометричното тълкуване на предложения метод е илюстриран чрез примера на съзвездието от четири Glonass и един GPS, фиг. 1. GPS навигационния радиосигнал, получен от приемащото устройство, е задвижващият сигнал, а приемателният канал на приемника на Glonass се задвижва. Съответно, Glonass навигационните сигнали, приемащото устройство на СА са роби. В съответствие с гореизложеното 
Където
- разликата между измерения диапазон между всеки задвижван Glonass - потребителят и между главния GPS е потребител, използвайки кодове за намиране на обхват; ![]() - разлики в двойна обхват. Геометричното тълкуване на определянето на координатите и компонентите на векторните разлики между скоростта между стъпките на обхвата и двойните разлики между стъпките, измерени чрез увеличаване на фазите на носителя, се обясняват с примера на две ka: водещият ка и един роб glonass , Фиг. 2. Точки t 1, t *, t 2 показват позициите на NISA в орбита, които са граници на пробите от навигационния параметър (интервал на измерване). Разликата на стъпките на обхвата ще бъде записана, както следва, съответно:
- разлики в двойна обхват. Геометричното тълкуване на определянето на координатите и компонентите на векторните разлики между скоростта между стъпките на обхвата и двойните разлики между стъпките, измерени чрез увеличаване на фазите на носителя, се обясняват с примера на две ka: водещият ка и един роб glonass , Фиг. 2. Точки t 1, t *, t 2 показват позициите на NISA в орбита, които са граници на пробите от навигационния параметър (интервал на измерване). Разликата на стъпките на обхвата ще бъде записана, както следва, съответно: 
Ще се вземат предвид двойните разлики в стъпките на обхвата 
Разстоянието различия в квадратните скоби на системата на уравнения (1) показват своите предимства, както е показано по-горе на такива разстояния (бази) между разпоредбите на NISI в орбита, когато те са съизмерими с разстоянието между NCA и дефиниращия обект. В нашия пример базата е незначителна. За да извърши това условие, системата на уравненията (2) се превръща в идентична система на уравнения, която това условие извършени: 
Така, от обхвата на разликите в диапазона за орбити с идентични параметри на орбитите за съзвездието от 5 NCA, един GPS е водещ, четири Glonass - роби. Крайни системи на уравнения за разлики в дестилатността (1) и за двойни разлики в стъпките на обхвата (3), изразени чрез координатите в геометричната правоъгълна координатна система, ще направят изглед
За двойни далечни разлики  ,
,
За двойни далечни разлики  ;
; ;
; ,
,
Където  - Координати на робския NISS, предаден в навигационните съобщения по време на време t 1, t 2, съответно. По същия начин, използвайки резултатите от измерването, използвайки SSN, компонентите на вектора на скоростта се определят:
- Координати на робския NISS, предаден в навигационните съобщения по време на време t 1, t 2, съответно. По същия начин, използвайки резултатите от измерването, използвайки SSN, компонентите на вектора на скоростта се определят:  ;
; ;
; ,
,
Където  - Компоненти на NISZ скорост вектор, предаван в навигационни съобщения, съответно t 1, t 2 съответно. Анализ на системата за навигационни уравнения на разликите в дестилацията (4), двойни разлики в стъпките на обхвата (5) и скорости (6), като се използват водещи, задвижвани радиосигнали на NISS и съответните приемни устройства, канали, виждаме, че координатите на водещите NISS GPS се компенсират в уравненията, компенсират грешка, дължаща се на несъответствието между времето и честотата на GPS, Glonass по отношение на времевата скала, честотата на обекта. Ако в навигационните уравнения на известния метод има грешки, причинени от йоносфера, тропосфера, след това в уравненията на предложения метод, използвайки двойни дистратори, има техните разлики. За да се гарантира високата точност за решаване на проблема с навигацията, поради геометричния фактор за определяне на положението в пространството, положението на KA в пространството е избрано по такъв начин, по който е в зенита (осигуряваща висока точност на определяне на определянето на определянето на определянето на позиция с вертикална), а останалата част от KA - в хоризонталната равнина в посоките, различаващи се един от друг до 120 - 180 o (осигурявайки висока точност на определяне на хоризонталното положение), в зависимост от броя на използваните потребители. Така, предложеният метод, въпреки, например, относно сериозните различия в Glonass и GPS, в методите за зачитане на ефемерида, в оформлението на суперкадерите и рамковите структури на персонала, в нередността на пространствените координатни референтни системи и разликата между тях Мащабът на времето, генериран от различни честотни стандарти и време, им позволява да ги използват, без да ги извършват в необходимото съответствие, т.е. Без подобрения на организационните материали и усъвършенстване на системите за математическа поддръжка. Вземане на паралелно или последователно сигнали за радио навигация на Glonass и GPS, използвайки устройство за получаване на мултиплекс или многоканален, както и приемане в една серия от измервания като водещ GPS и като задвижван Glonass и обратното в друга серия, можете да дефинирате Координатите и компонентите на вектора на скоростта обект както в системата за координатна система на GPS, така и в координатна система Glonass, без да ги водят в съответствие с. Споделяне Системите ще осигурят известна универсалност на релевациите за навигация, надеждността и надеждното наблюдение чрез сравняване на резултатите от определенията на различни системи за идентифициране на случаи на нарушаване на функционирането на една от системите. Съгласно надеждността на навигационната подкрепа тя се разбира като способността на навигационната система по всяко време да се осигури обект на информация, за да се определи местоположението с точност, гарантирана за работната зона. При надеждност той се разбира като способността на навигационната система да идентифицира отклоненията в неговото функциониране, което води до влошаване на точността на определяне на координатите и компонентите на вектора на скоростта на обекта извън определените валидни стойности. Ако системата от навигационни уравнения на двойната разлика в предложения метод, използващи измервания, използващи граници (1) е по същество система от уравнения на разликите в обхвата, системата на навигационните уравнения на двойните разлики в стъпките на обхвата, измерени чрез увеличения на фази носители в a Интервал на измерване (2) е системния уравнения на двойни дистратори и също така ви позволява да решите навигационната задача - да определите координатите на местоположението и компонентите на вектора на скоростта на обекта. Тъй като, както е показано по-горе, точността на двойната разлика на стъпките на фазите в честотите на носителя е по реда на по-висока точност на измерване на разликите в последователността на кодовете, точността на решаването на проблема с навигацията също е по-висока от точността на разтвора, използвайки различия в дестилацията. За да се увеличи допълнително точността за решаване на проблема с навигацията, използвайки фазови стъпки на честотите на носителя, поради изключения от измерванията на грешката, дължащи се на SSN, двойните разлики в стъпките на обхвата се правят чрез разпределяне от получени сигнали с честоти равни на доплерова честотни разлики, използващи квадратни фазови детектори, на първите изхода на които са получени от главния сигнал, и на вторите входове - сигнали на задвижвани приемни устройства, след това определянето на разликите в стъпките на фазите чрез умножаване на средните стойности чрез умножаване на средните стойности На доплеровите честотни разлики на дим интервал и определяне на двойните разлики в стъпките на фазите чрез взаимно изваждане. Очертаният съответства на внедряването на хардуер, чиято блокова диаграма е показана на фиг. 3. Избиране на сигнали с доплерови честоти при получаване на фазови модулирани сигнали с депресирани носители, се извършва чрез изграждане на квадрат и филтриране с последваща честота се връща към желаното използване на честотни делители. Сигнали от изходите на устройства за конволюция, които се записват на SSN SSN системите на приемащите устройства Фиг. 3, в режим на синхрон, забавянето на Rangefinder са значително тесни сигнали - възстановени носители, индустриализирани чрез цифрова информация. Диапазоните на промените в стойностите на носителя се определят главно от доплезовото изместване (50 kHz при честотите на GPS, Glonass), а ширината на спектъра на сигнала е спектър от цифрова информация (100 Hz). Сигналите FAPL могат да проследяват сигнали, съответстващи само на една от двете странични ленти, и следователно имат загуби на енергия, равни на 3 dB. Следователно свързващите устройства за разпределение от получени навигационни сигнали, равни на разликите в честотата на допур на предложения метод от фиг. 3, с изключение на вторите странични ленти, не допринася допълнителни енергийни загуби. Приетите и трансформирани радиопридатъчни сигнали за спътникова навигация, които влизат в квадратурните фазови детектори, вече носят честотните промени поради нестабилността на KA генераторите, обектът, причинен от условията за разпространение на радиовълни (йоносфера, тропосфера), смени, причинени от приемащото получаване пътища и други фактори. Следователно, в процеса на екскреция на трептенията с честоти, равни на разликите в допужалната честота на предложения метод, изброените отклонения на честотата частично се компенсират. И с тройни разлики, техният принос към точността на дефинициите за навигация ще бъде незначителен. Когато се използва за решения на навигационния проблем за увеличаване на фазите на въздействието на фазовото увеличаване на точността, дължаща се на йоносферата, тропосферата за екстремни точки на измервателния интервал се различават малко и при образуването на втори разлики е почти елиминирана. Специална отличителна характеристика на предложения метод е, че при измерване на разликите във фазовите стъпки, използващи трептения, равни на доплерова честотни разлики, сигнал за всеки източник на радиация може да се използва като водещ сигнал: наземен, въздушен основен или емисия на други системи. В този случай основното изискване за приемащото устройство на дефиниращия обект е способността да се вземе сигнал и да го преобразува по такъв начин, че да осигури работата на блока на квадратна фаза детектори. Освен това, координатите на радиационните източници, техните временни системи, честотната нестабилност и увеличаване на честотата поради разпределението на радиовълните не е необходимо да се изисква. Те се компенсират в процеса на измерване на навигацията. Най-много. оптимални опции Учебното прилагане на предложения метод е вариант, когато сигналите на носителите се използват като водещ сигнал на приемащото устройство на обекта, амитации от стойностите на Rangefall на симулаторите. Симулаторите ви позволяват да оптимизирате скоростта на промяната на честотите, специално за всеки тип навигационни системи и по този начин да се гарантира тяхната оптимална работа по отношение на получаването на потенциално точност на определяне на координатите на местоположението и компонентите на вектора на скоростта на обекта. Отличителни характеристики на предложения метод:
- Компоненти на NISZ скорост вектор, предаван в навигационни съобщения, съответно t 1, t 2 съответно. Анализ на системата за навигационни уравнения на разликите в дестилацията (4), двойни разлики в стъпките на обхвата (5) и скорости (6), като се използват водещи, задвижвани радиосигнали на NISS и съответните приемни устройства, канали, виждаме, че координатите на водещите NISS GPS се компенсират в уравненията, компенсират грешка, дължаща се на несъответствието между времето и честотата на GPS, Glonass по отношение на времевата скала, честотата на обекта. Ако в навигационните уравнения на известния метод има грешки, причинени от йоносфера, тропосфера, след това в уравненията на предложения метод, използвайки двойни дистратори, има техните разлики. За да се гарантира високата точност за решаване на проблема с навигацията, поради геометричния фактор за определяне на положението в пространството, положението на KA в пространството е избрано по такъв начин, по който е в зенита (осигуряваща висока точност на определяне на определянето на определянето на определянето на позиция с вертикална), а останалата част от KA - в хоризонталната равнина в посоките, различаващи се един от друг до 120 - 180 o (осигурявайки висока точност на определяне на хоризонталното положение), в зависимост от броя на използваните потребители. Така, предложеният метод, въпреки, например, относно сериозните различия в Glonass и GPS, в методите за зачитане на ефемерида, в оформлението на суперкадерите и рамковите структури на персонала, в нередността на пространствените координатни референтни системи и разликата между тях Мащабът на времето, генериран от различни честотни стандарти и време, им позволява да ги използват, без да ги извършват в необходимото съответствие, т.е. Без подобрения на организационните материали и усъвършенстване на системите за математическа поддръжка. Вземане на паралелно или последователно сигнали за радио навигация на Glonass и GPS, използвайки устройство за получаване на мултиплекс или многоканален, както и приемане в една серия от измервания като водещ GPS и като задвижван Glonass и обратното в друга серия, можете да дефинирате Координатите и компонентите на вектора на скоростта обект както в системата за координатна система на GPS, така и в координатна система Glonass, без да ги водят в съответствие с. Споделяне Системите ще осигурят известна универсалност на релевациите за навигация, надеждността и надеждното наблюдение чрез сравняване на резултатите от определенията на различни системи за идентифициране на случаи на нарушаване на функционирането на една от системите. Съгласно надеждността на навигационната подкрепа тя се разбира като способността на навигационната система по всяко време да се осигури обект на информация, за да се определи местоположението с точност, гарантирана за работната зона. При надеждност той се разбира като способността на навигационната система да идентифицира отклоненията в неговото функциониране, което води до влошаване на точността на определяне на координатите и компонентите на вектора на скоростта на обекта извън определените валидни стойности. Ако системата от навигационни уравнения на двойната разлика в предложения метод, използващи измервания, използващи граници (1) е по същество система от уравнения на разликите в обхвата, системата на навигационните уравнения на двойните разлики в стъпките на обхвата, измерени чрез увеличения на фази носители в a Интервал на измерване (2) е системния уравнения на двойни дистратори и също така ви позволява да решите навигационната задача - да определите координатите на местоположението и компонентите на вектора на скоростта на обекта. Тъй като, както е показано по-горе, точността на двойната разлика на стъпките на фазите в честотите на носителя е по реда на по-висока точност на измерване на разликите в последователността на кодовете, точността на решаването на проблема с навигацията също е по-висока от точността на разтвора, използвайки различия в дестилацията. За да се увеличи допълнително точността за решаване на проблема с навигацията, използвайки фазови стъпки на честотите на носителя, поради изключения от измерванията на грешката, дължащи се на SSN, двойните разлики в стъпките на обхвата се правят чрез разпределяне от получени сигнали с честоти равни на доплерова честотни разлики, използващи квадратни фазови детектори, на първите изхода на които са получени от главния сигнал, и на вторите входове - сигнали на задвижвани приемни устройства, след това определянето на разликите в стъпките на фазите чрез умножаване на средните стойности чрез умножаване на средните стойности На доплеровите честотни разлики на дим интервал и определяне на двойните разлики в стъпките на фазите чрез взаимно изваждане. Очертаният съответства на внедряването на хардуер, чиято блокова диаграма е показана на фиг. 3. Избиране на сигнали с доплерови честоти при получаване на фазови модулирани сигнали с депресирани носители, се извършва чрез изграждане на квадрат и филтриране с последваща честота се връща към желаното използване на честотни делители. Сигнали от изходите на устройства за конволюция, които се записват на SSN SSN системите на приемащите устройства Фиг. 3, в режим на синхрон, забавянето на Rangefinder са значително тесни сигнали - възстановени носители, индустриализирани чрез цифрова информация. Диапазоните на промените в стойностите на носителя се определят главно от доплезовото изместване (50 kHz при честотите на GPS, Glonass), а ширината на спектъра на сигнала е спектър от цифрова информация (100 Hz). Сигналите FAPL могат да проследяват сигнали, съответстващи само на една от двете странични ленти, и следователно имат загуби на енергия, равни на 3 dB. Следователно свързващите устройства за разпределение от получени навигационни сигнали, равни на разликите в честотата на допур на предложения метод от фиг. 3, с изключение на вторите странични ленти, не допринася допълнителни енергийни загуби. Приетите и трансформирани радиопридатъчни сигнали за спътникова навигация, които влизат в квадратурните фазови детектори, вече носят честотните промени поради нестабилността на KA генераторите, обектът, причинен от условията за разпространение на радиовълни (йоносфера, тропосфера), смени, причинени от приемащото получаване пътища и други фактори. Следователно, в процеса на екскреция на трептенията с честоти, равни на разликите в допужалната честота на предложения метод, изброените отклонения на честотата частично се компенсират. И с тройни разлики, техният принос към точността на дефинициите за навигация ще бъде незначителен. Когато се използва за решения на навигационния проблем за увеличаване на фазите на въздействието на фазовото увеличаване на точността, дължаща се на йоносферата, тропосферата за екстремни точки на измервателния интервал се различават малко и при образуването на втори разлики е почти елиминирана. Специална отличителна характеристика на предложения метод е, че при измерване на разликите във фазовите стъпки, използващи трептения, равни на доплерова честотни разлики, сигнал за всеки източник на радиация може да се използва като водещ сигнал: наземен, въздушен основен или емисия на други системи. В този случай основното изискване за приемащото устройство на дефиниращия обект е способността да се вземе сигнал и да го преобразува по такъв начин, че да осигури работата на блока на квадратна фаза детектори. Освен това, координатите на радиационните източници, техните временни системи, честотната нестабилност и увеличаване на честотата поради разпределението на радиовълните не е необходимо да се изисква. Те се компенсират в процеса на измерване на навигацията. Най-много. оптимални опции Учебното прилагане на предложения метод е вариант, когато сигналите на носителите се използват като водещ сигнал на приемащото устройство на обекта, амитации от стойностите на Rangefall на симулаторите. Симулаторите ви позволяват да оптимизирате скоростта на промяната на честотите, специално за всеки тип навигационни системи и по този начин да се гарантира тяхната оптимална работа по отношение на получаването на потенциално точност на определяне на координатите на местоположението и компонентите на вектора на скоростта на обекта. Отличителни характеристики на предложения метод:
Получаване на N-канал Получаване на навигация Радио Сигнали N сателити, един от каналите на който е водещ, а други - задвижвани;
Определяне на разликите между диапазоните и разликите в диапазона чрез изваждане от измерените стъпки на фазите на носителя на носителя на кодовите последователности от задвижващите приемни устройства за нарастване на носителя и времевата промяна на кодовата последователност, измерена чрез устройството за приемане на устройството;
Определяне на двойните разлики между стъпките и диапазоните на обхвата чрез взаимно изваждане на разликите между двойните разлики на стъпките на фазите на носителите и разликата между измествата на кодовите последователности в последователността, определена от геометричния фактор за определяне на позицията в пространство;
Използването на дестилационни разлики в стъпките на фазите на носителите за определяне на координатите и компонентите на вектора на скоростта на обекта;
Измерване на двойните разлики в стъпките на обхвата чрез избиране на сигнали с честоти, равни на доплерови честотни разлики, получени от задвижването и всеки задвижван канал на приемащото устройство, използвайки квадратна фаза детектора, на първите входове, от които се получават сигналите на задвижващия канал, и вторият входовете са задвижвани сигнали и им умножават средните стойности за измервателен интервал;
получаване на водещ канал на приемащото устройство на радиосигналите на земята, въздушни източници на радио емисии и радио емисии на космически кораб на други системи;
Използване от задвижващите канали на приемащото устройство като сигнал за симулатори;
Избор на сигнали с доплерови честоти при получаване на фапзелизирани сигнали с депресирани носители, като ги издигате на квадрат и филтриране, последвани от честоти на връщане към желаното използване на честотни делители. Така, предложен метод за определяне на координатите на местоположението и компонентите на вектора на скоростта на обектите съгласно радиосигналите на КПТП, има новост, значими разлики и дава положителен ефект при използване на точността, надеждността и точността на навигационните дефиниции на сателит и наземни радионавигационни системи.
. \\ T три основни метода Определения на пространствените координати на обектите:
линии и повърхности на позицията;
корелация-екстремни;
номер на пътя.
Но последните две в момента са приложими само за автономни навигационни системи, т.е. При определяне на местоположението на Лос Анджелис. Дефиницията на координатите на целите понастоящем се основава на използването на линиите и повърхностните повърхности.
Общността на физическите основи на радиордалометрия и радиоизлишените ползи намира израз, че местоположението на целта може да бъде монтирано не само по неговата гама и ъглите, измерени от една точка O (фиг. 1.3), но и чрез измерване на обхвата или ъглите от посочените точки и (фиг. 1.7). Най-голямата употреба е получена дистанция, разлика
паднал, рибар (посока намиране) и откриване на обхват и ядосан
(Комбинирани) методи за определяне на местоположението на целите.



Фиг. 1.7. Методи за определяне на местоположението на обектите:
a - Rangefilling; b - разстояние; In - Намиране на посока (U-
лош)
В радар за определяне на местоположението на целта (обект), позиционният метод, базиран на използването на повърхности или линии на позицията, най-често се използва за определяне на мястото на обекта в пространството или на повърхността на земята. Повърхността на позицията е геометрично местоположение на точките в пространството, съответстващо на състоянието на постоянството на параметъра (измерените координати спрямо референтната точка (диапазон, ъгъл и т.н.)).
Местоположението на LA в пространството е като точката на пресичане на трите повърхности на позицията (PP). Пресечването на две повърхности на позицията дава позиционната линия (LP), която е геометрично местоположение на точките с постоянни стойности на два параметъра. За да видите точката в пространството, имате нужда от пресичане на трите повърхности на позицията или линията и позицията на позицията. Ако целта на йопренните точки в една и съща равнина е достатъчна от две LPS (определение на две координатни цели, които се измерват с два RLD) (фиг. 1.7).
Паднал метод се намира при определяне на местоположението на целта m
(Фиг. 1.7, А) измерване на разстоянията между целта и точките за подкрепа ,. \\ t
Всяка повърхност на позицията е сфера с център в подкрепа
г-н абзац и радиус, равен на обхвата. Като точка М., са в една и съща равнина, след това повърхността на позицията се движи в радиузиса на кръста на точката на пресичане М.. Има друга точка за пресичане на кръговете, но неяснотата на измерванията може да бъде изключена.
Разлика (Фиг. 1.7, б) изисква присъствието на две двойки опорни точки в равнината, и. Един от тях обикновено е често срещан
(). Всяка двойка станции се използва за получаване на LP под формата на фокус на хипелла в точките за подкрепа. Тези линии са изградени като геометрични места
точки с постоянни разстояния за разстояние: ![]() oTI;
oTI; ![]() oTI. Точката на пресичане на хипелбола съвпада с целта на М.
oTI. Точката на пресичане на хипелбола съвпада с целта на М.
Agleery. (Намиране на посока) Методът се основава на използването на насочените свойства на антените. Този метод се осъществява чрез радиофазол, монтиран на обект m, и два радиоматерии, разположени в ретати и (фиг. 1.7, с) с база b.
Радиоторът е радиоза устройство с насочена антена, а радиото е предавателно устройство с нерефлорна антена. Забавянето измерва азимутите на Маякайма и тъй като LPS постоянен лагер (\u003d const \u003d const) са директни, преминаващи в ъгли, в южната посока - север, те имат една точка на пресичане, което е желаното, т.е. съвпада с цел М.
Падна и ядосан Метод (фиг. 1.2, 1.3, 1.8) изисква само една станция, съдържаща радиоинженер и радиофазол. От постоянната точка на станцията за Rangefinder определя наклонената гама от целта, а посока на търсач определя посоката към целта, т.е. нейния азимут а и ъгъл на β.
Целта на m е на пресечната точка на обхвата на Rangefinder под формата на радиус на купа и LP на посоката Finder - под формата на права линия с ъгловите координати α и β, преминаващи през точката O. Този метод е най-характерно за радар, а останалите методи са за радио навигация. Въпреки това, в радарните места, местоположението на целта определя понякога две или повече точки. Например, ако обичайният PLA произвежда грешки при забавяне, след това прибягват до метод за намиране на диапазон и ако частта на радара не може да се използва поради тежка смущения или под пасивния радар, след това прибягват до метода за намиране на посоки.

Фиг. 1.8. PP при определяне на местоположението на позицията на обекта (
метод за регистрация
По този начин, в радиолокация за определяне на местоположението на обекта, се използват позиционните методи, базирани на използването на PP или LP. Изборът на метода определя количеството RLD в системата.
Заключение
1. Посветени от целите на радарни сигнали, цялата информация за тях е положена, тъй като се отразява всички параметри на сигнала (амплитуда, честота, начална фаза, продължителност, спектър, поляризация и др.).
2. Местни и глобални се използват в съвременния радар. Местните SCS са разделени на цилиндрична и сферична SC, Global SK - по географски и геосперични.
3. Съгласно принципите на формиране на радарни сигнали, радарните методи са разделени на активни, полуактивни и пасивни. На практика те често се комбинират при проектирането на радарни системи.
4. В радара се определят местоположението на обекта, се използват позиционните методи, базирани на използването на PP или LP.
Изборът на метода определя количеството RLD в системата.
Контролни въпроси:
1. Принципът за измерване на диапазона в радар.
2. принципът на намиране на посока в радар.
3. принципа за измерване на скоростта в радара.
4. основните елементи на сферичното SC, използвани в радар.
5. основните елементи на цилиндричната НС, използвани в радар.
6. основните елементи на географското ска.
7. основните елементи на геоцентричния SC.
8. Същността на активните методи за формиране на радарен сигнал.
9. Същността на полуактивните и пасивните методи за формиране на радарен сигнал.
10. Същността на методите за намиране и различно разстояние за определяне на местоположението на обекта.
11. Същността на случайните и обхват намиране и високи методи за определяне на местоположението на обекта.
Задача за независимо обучение:
1. Да изучавате материалите от лекцията.
2. Подгответе се за контрол на работата по контрол на контрола.
Литература:
1. Бакулев PA. Радарни системи: учебник за университети. -
М.: Радио инженеринг, 2004.
2. Белоцерковски GB. Основи на радар и радар
устройства. - т.: Съветско радио, 1975.
Този метод се основава на измервателното разстояние R. между точките на радиация и получаването на сигнала във времето на разпространението му между тези точки. В радиовъйба, търсачите на обхват работят с активен сигнал за отговор, излъчван от предавателя на антената (Фиг. I.5.1) при получаване на поискан сигнал. Ако времето за разпределение на сигнала за заявка t. 3 и отговор t. относно Същото, и времето на формиране на сигнала за отговор в респондента е незначително, след това диапазонът, измерен от заявителя (радио)
Като отговор може да се използва и отразен сигнал, който се извършва при измерване на диапазона на RLS или височина чрез радио версия.
Повърхността на обхвата на системата Rangefinder е повърхността на топката с радиус R.. Позицията линиите върху фиксираната равнина или сферата (например на повърхността на земята) ще бъдат обиколки, така че понякога се наричат \u200b\u200bсистемите на Rangefinder циркулярен . В този случай местоположението на обекта се определя като точка на пресичане на две позиционни линии. Тъй като окръжните се пресичат в две точки (фиг. 2.3), има двойно позоваване, за да се изключат допълнителни инструменти за ориентация, чиято точност може да бъде ниска, но достатъчна, за да избере надеждно една от двете точки на пресичане. Тъй като измерването на времето за забавяне на сигнала може да бъде направено с малки грешки, Rangefinder RNS ви позволява да намерите координати с висока точност. На свой ред системите на Rangefinder са разделени
Радиоустройства без ответник;
радиоустройства с ответника;
радио-твърдомери.
Принцип на работа радио етикет без ответник Това е, че когато измервате разстоянието между точката на подкрепа на Земята и обекта (цел), интервалът от време се измерва между момента, в който радиото импулс на земята радиопредавател и момента на получаване на радиото. За да направите това, на борда и на земята трябва да бъдат стандартите на времето, които синхронизират работата на земята и бордовото оборудване. Параметърът на радиоинженера без ответника ще бъде разстояниемежду заявителя и обекта (цел).
В радио пръчки с ответника измерва се интервалът между запитването и реакцията. Параметърът на такъв радиоинженер ще се удвои между заявителя и ответника.
Параметър радио порода е двойна височина на Лос Анджелис над повърхността на земята.
Методите за радиораздел започнаха да се прилагат по-късно от случаите. Първите образци на радиозакъснението въз основа на фазовите фазови измервания бяха разработени в СССР под посоката на L. I. Mantelstam, N. D. Palekxi и Е. Ya. Schegolev през 1935-1937. Методът на импулса за измерване на обхвата се прилага върху импулсен радар, разработен през 1936-1937. Под ръководството на Ю. Б. Коберев.
Метод на разликата.
С помощта на транспондер, разположен на борда на обект, определете разликата в момента на получаване на сигнали от предавателите на две референтни станции: НОи В.Станция НОнаречена олово, тъй като използването на неговите сигнали е синхронизацията на робската станция В.Измерване на разликата в разстоянието, пропорционална на смяна на сигналите от станцията А и Б,позволява ви да намерите само повърхността на позицията, съответстваща на тази разлика и имаща форма на хиперболоид. Ако трансцендентността и станциите НОи Вразположени на повърхността на земята, след това измерване  ви позволява да получите линия на повърхността на земята под формата на хиперболи с
ви позволява да получите линия на повърхността на земята под формата на хиперболи с  . За две станции можете да построите семейство хипелбол с фокус на мястото на местоположението А и В.Нарича се разстоянието между станциите база
.
За дадена база, семейството на хипелбола се прилага към картата предварително и цифровизирано. Въпреки това, един двойка станции ви позволява да определите само линията на позицията, върху която се намира обектът. За да намерим местоположението му, е необходима втора двойка станции (фиг. II.2.3), основата на която д. 2
трябва да се намира под ъгъл към базата данни д. 1
Първа двойка. Обикновено водеща станция НОтой е обща и синхронизира работата на двете робски станции. В 1
и В 2
.
Мрежествените линии на позицията на такава система се формират от две семейства, пресичащи се хипелбол, което позволява да се намери местоположението на обекта (целта) на рецептора (PI), разположен на борда. Точността на системата за различие - системата е по-висока от точността на случайния и приближаване към точността на класацията. Предимството на този метод е неограничено
. За две станции можете да построите семейство хипелбол с фокус на мястото на местоположението А и В.Нарича се разстоянието между станциите база
.
За дадена база, семейството на хипелбола се прилага към картата предварително и цифровизирано. Въпреки това, един двойка станции ви позволява да определите само линията на позицията, върху която се намира обектът. За да намерим местоположението му, е необходима втора двойка станции (фиг. II.2.3), основата на която д. 2
трябва да се намира под ъгъл към базата данни д. 1
Първа двойка. Обикновено водеща станция НОтой е обща и синхронизира работата на двете робски станции. В 1
и В 2
.
Мрежествените линии на позицията на такава система се формират от две семейства, пресичащи се хипелбол, което позволява да се намери местоположението на обекта (целта) на рецептора (PI), разположен на борда. Точността на системата за различие - системата е по-висока от точността на случайния и приближаване към точността на класацията. Предимството на този метод е неограничено  възможност за въже, тъй като наземните станции могат да служат на неограничен брой PI, разположени в обхвата на системата, тъй като на борда на определящия обект няма нужда да има предавател, както в системата, оценена с обхвата. Трябва да се отбележи, че хипербол асимптотите са прави линии, преминаващи през центъра на базата на всяка двойка системни станции. По този начин, на разстояния, няколко пъти по-висока от дължината на основата, линиите на позицията се дегенерират в директни, в резултат на което системата за различие може да се използва като висок.
възможност за въже, тъй като наземните станции могат да служат на неограничен брой PI, разположени в обхвата на системата, тъй като на борда на определящия обект няма нужда да има предавател, както в системата, оценена с обхвата. Трябва да се отбележи, че хипербол асимптотите са прави линии, преминаващи през центъра на базата на всяка двойка системни станции. По този начин, на разстояния, няколко пъти по-висока от дължината на основата, линиите на позицията се дегенерират в директни, в резултат на което системата за различие може да се използва като висок.
В зависимост от видовете сигнали на наземните станции и метода за измерване на времето за изменение на сигналите на получената PI, отличават:
импулсна фаза разлика.
импулс;
Принципът на системата за различаване на импулса е предложен от съветския инженер Е. М. Рубчински през 1938 г., но широко разпространените такива системи са получили само до края на Втората световна война, когато са разработени методи за точно измерване на времето на импулсите. Първата система за дистанционна система (фазова сонда) е създадена в СССР през 1938 г. В бъдеще този принцип е използван в системите "Deca", "координатор" и др.
Изпратете добрата си работа в базата знания е проста. Използвайте формата по-долу
Студентите, завършилите студенти, млади учени, които използват базата на знанието в обучението и работата ви, ще ви бъдат много благодарни.
Публикувано от http://www.allbest.ru/
UDC 519.711.3.
Метод за определяне на координатите и параметрите на движението на нелинейно движещ се обект, използвайки само мемориална информация
Пунтинен Сергей Александрович
Северозападна държавна кореспонденция Технически университет,
Сен-Петербург, Русия
Анотации
Статията обсъжда метода за изчисляване на оценката на траекторията на нелинейно движещ се обект, използвайки само мемориална информация. Методът има свойства за непрекъснатост, устойчивост и ви позволява да подобрите точността на определяне на параметрите на движение в сравнение със съществуващите методи
Ключови думи: анализ на траекторията, сближаване, нелинейно движение, професионална информация, параметри за движение
Метод за откриване на координати и движещи параметри за нелинейно движение, използващо информация само за лагери
ПИННИНЕН СЪРЖИЕ АЛЕКСАНДРОВИЧ
Северозападни държавни технически университети,
Св. Петербург, Русия.
Статията описва метода за изчисляване на траекторията на оценката на нелинеен движещ се обект, използвайки само информация само за лагери. Методът има свойствата на непрекъснатост, устойчивост и подобрява откриването на точността на движението на параметрите в сравнение със съществуващите методи
Ключови думи: анализ на траекторите, сближаване, безлинейно движение, информация само за лагери, параметри за движение
Въведение
Някои от най-сложните видове алгоритми в навигационните системи са алгоритми за определяне на координатите и параметрите на движението на обекти (EFO) според високата информация. Към днешна дата има няколко математически метода, подходящи за прилагане на тези алгоритми, и всеки от тях има редица значителни ограничения в областта на идентифицирането на ефективността на нелинейно движещи се обекти. Използването на методи за анализ на системата ни позволи да формулираме нова формулировка на задачата и да го развиваме нов метод Решения с редица значителни предимства.
Формулиране на проблема
Обектът за наблюдение (IT) се движи в двуизмерно пространство за гладка пътека, която е функцията на координатовия вектор от време на време и съдържа цялата пълнота на информацията за позицията, параметрите и естеството на обекта за наблюдение .
Траекторията на наблюдателя е описана с подобна функция, която подновява добре известната и адекватна реална позиция и параметрите на движението на наблюдателя.
В отделни моменти от времето, избрано на униформената мрежа с началото на координатите и стъпка, наблюдателят измерва ъгъла на лагера върху обекта на наблюдение. Под ъгъла на лагера се разбира като ъгъл между посоката на север и посоката на обекта на наблюдение.
Наблюдението на ъгъла на лагера е направено с определена грешка - наречена грешка на измерванията и се счита за разпределена съгласно нормалния закон.
Необходимо е съгласно данните за наблюдението да се възстанови траекторията на движението на целта с дадена точност.
N-полиномерен метод
Задачата за изграждане на обект на обект за наблюдение е задача за изграждане на функция за приближаване на някои отделни стойности, получени в резултат на обработка на наблюдение.
За да разрешите тази задача, трябва да въведете функцията, която изпълнява връзката на данните за наблюдение с очакваните параметри.
Ние правим това, като поставяме уравнението на права линия, преминаваща през положението на наблюдателя и то и пилингната линия (фигура 1).
Фигура 1. Дефиниция на лагерната линия върху нея.
Координатите на наблюдателя, - координира Пс. - ъгъла на лагера върху него.
Директното уравнение има формата:
къде е линейният ъглов коефициент.
Предполагаме, че наблюдателят се движи по траекторията, описана от функциите.
За да намерите функцията на траекторията на движението на обекта, ние изграждаме приблизително координати от време за наблюдение, което ги изразява чрез линейна комбинация от ортогонални полиноми, като полиноми:
където - чебишев полиноми на 1 или 2-ри;
Определено време за наблюдение.
Решетка за вземане на проби за всяко изчисление на измерването по формулата:
където - времето на наблюдение е първото време за наблюдение,
Последно време за наблюдение.
В хода на решаването на проблема получаваме данни за позицията на наблюдавания обект под формата на ъгли на лагера, които след това се превръщат в ъглови коефициенти за уравнение (1), както следва:
Благодарение на изчислителните характеристики на тригонометричните функции, не-равномерното въздействие върху точността на изчисленията при различни стойности на функцията на функцията.
За да се сведе до минимум ефектът от шумовите смущения за всяко уравнение на наблюдението, ние ще приложим идентичното превръщане на координатите, които завъртат базовата координатна система, така че ъгъла на наблюдение да нова система Координатите бяха близо до 0 °.
За това ще обърнем координатите с ъгъла, който ще изберем така. В този случай ъгловият коефициент на уравнение (1) ще бъде под формата:
Ние пишем координатите на обекта на наблюдение в ротационната координатна система
Подобни трансформации ще се извършват както за координатите на наблюдателя.
Чрез пренаписване на уравнение (1) за завъртаната координатна система и групираните добре известни членове до дясната страна, ние получаваме:
Като се има предвид (5) и заместване (6) в (7) Получаваме:
Обозначаваме
За удобство, напишете (8) като:
Заместване на приближаващите функции (2) в (9) за всяко произведени наблюдения, и след това превръщането на получената система до матрична форма, ние получаваме матричното уравнение:
Тук (11) е наблюдателна матрица, a (13) векторната колона, съдържаща координатите на наблюдателя.
Решаването на системата (10) относно X, ние ще намерим коефициентите. Траектория нелинейно движение chot
Заместване на намерения фактор (2), получаваме желаните функции, които определят траекторията на движението на обекта за наблюдение.
Използването на системата на ортогоналната полиномна система Chebyshev позволява наблюдение на обект върху еднаква временна мрежа, докато количеството на измерванията може да надвишава 2 * п, където n-степен на полином, приближаване на пътя на обекта.
В този случай е необходимо да се приведе матрицата А до квадрат. За да разрешите този проблем, използваме широко използвания метод на най-малките квадрати, който ще позволи допълнително измерване на филтриране. В резултат на това системата (10) ще приеме формата:
По-нататъшното решение на системата се извършва подобно на решаването на системата (10).
Сравнително анализ на точността Определяне на параметрите на движението за учебните методи
След това представяме основните резултати от сравнително моделиране на грешка в разграничението до наблюдавания обект съгласно метода N-DELEMP и N-полиномния метод.
Фигури 2-5 представя резултатите за различни видове Движение на обекта на наблюдение.
Фигура 2. Грешка при определяне на разстоянието до него, с равномерно праволинейно движение.
Фигура 3. Грешка при определяне на разстоянието до него с равновесно праволинейно движение.
Затъмнена повърхност - метод на N-лагер;
Рамкова повърхност - N-полиномерен метод.
Фигура 4. Грешка при определяне на разстоянието до него с нелинейно движение.
Затъмнена повърхност - метод на N-лагер;
Рамкова повърхност - N-полиномерен метод.
Фигура 5. Грешка при определяне на разстоянието до него с равномерно движение с промяна в курса.
Затъмнена повърхност - метод на N-лагер;
Рамкова повърхност - N-полиномерен метод.
Разпределението на осите на графиките 2-5:
- неопределен номер на дискретно наблюдение;
- максимално ниво на шума при наблюдение на ъгъла на лагер (в ъгловите минути);
- Axis e-грешка на определянето на разстоянието (в% от обхвата към него).
За всеки, представен на типа на движението, изчислението се извършва според серията от 1000 компютни експерти.
Експериментални параметри: моделиране на шума на ъгъла на наблюдение за нормален закон с макс. Ниво на шума - 60, време за наблюдение - 600 s., Дискретен период на наблюдение - 15 s. начално разстояние до наблюдавания обект - 3000 m.
Фиг. 2 показва практическата еквивалентност на изследваните методи за случай на равномерно праволинейно движение. От показани на фиг. Може да се види 3-5 графики, значително подобрение на точността на определяне на разстоянието при използване на N-полиномния метод за нелинейно движещ се обект.
Консолидираните данни за сравнителните проучвания за точността на определянето на EFO за различни видове движение са показани в таблица 1.
Таблица 1 - Сравнение на точността на дефиницията на ЕФО съгласно метода N-Delemp и N-полиномния метод
|
Вид на движението на обекта |
Макс. Ниво на шума, |
Грешка за дефиниране на разстояние,% |
Грешка при определянето на модул за скорост,% |
|||
|
N-perelenty метод |
N-полиномерен метод |
N-perelenty метод |
N-полиномерен метод |
|||
|
Равномерна ясна |
||||||
|
Равен ясен |
||||||
|
По параболе с постоянно ускорение |
||||||
|
Униформа |
||||||
Обсъждането на резултатите
Предложеният метод се отнася до класа на геометрични методи и има значителна изчислителна простота и позволява:
1) да извърши адекватна оценка на траекторите на различно ниво на сложност, включително нелинейни траектории;
2) да извърши последващата оценка на вектора на скоростта, ускорението, скоростта на промяната на ускорението, като анализира координатната функция от време;
3) да извърши непрекъснато решение на проблема, но не и в зависимост от параметрите на движението;
4) да образуват по-точни оценки на ЕФО в сравнение с използвания на практика метод, в случаите на нелинейно движение на наблюдавания обект;
5) решаване на проблема в триизмерното пространство. За да направите това, ще бъде необходимо системата (2) от уравнението, която отчита височината на наблюдаваната цел и да се разшири уравнението на матрицата (10) със съответните уравнения за наблюдение.
Методът може да се прилага:
1) като независим метод за определяне на EFOS на нелинейно движение;
2) като алтернативен метод определяне на параметрите на движението на линейно движещи се обекти;
3) като метод за разработване на предварителни оценки в състава на адаптивните и други методи, изискващи задачата на предварителните оценки на движението на предмети.
Библиография
1. Benlian XU. Адаптивен алгоритъм за проследяване на лагери само маневриране Цел / Бенлин XU, Zhiquan Wang // IJCSNS Международен вестник на Компютърните науки и мрежова сигурност, 2007.- януари. Vol. 7, не. 1. - pp. 304-312.
2. HAMMEL S.E. Оптимално движение на наблюдатели за локализация с лагери / s.Hammel, p.liu, e.j.hilliard, k.f.gong.- Компютри и математика с приложения: -18 (1-3). - 1989.- pp. 171-180.
3. Landelle B. Възраждащи съображения за проследяване само на лагери / Б. Landelle / Информация Fusion 11-та международна конференция на - Франция: Thales Optronique, Universite Paris-Sud, - 2008. - P. 8
4. li. R. Проучване на целевото проследяване на маневриране. Част I. Динамични модели. / R. Ли и v.p. Jilkov / Aerospace и електронни системи, - IEEE транзакции на 39 (4), 2004.- pp. 1333-1364.
5. MIDIDBROOK D.L. Автоматизация за проследяване само на лагери за едно безпилотно подводно превозно средство: теза (и.00) Институт по технология на Масачузетс, катедра. На машиностроене, 2007.
6. SANG J.S. Входната оценка с множество модели за маневриране на целевото проследяване / Sang Jin Shin, Taek Lyul Song // Контролна инженерна практика, 2002. -ecember. Vol. 10, не. 12. - PP. 1385-1391.
7. Kudryavtsev K.V. Проучване и разработване на метода на рационално определяне на параметрите на движението на морски обекти според информацията за паметта. / K. V. KUDRYAVTSEV / DIS. КОД. Техно Наука - Москва, 2006.- 116С.- RGB OD, 61: 06-5 / 3066.
8. Павлов Б.в., Съвременни методи за навигация и контрол на движението: модели и методи за обработка на информация в задачите за контрол на движението / B.V. Павлов, Д.А. Goldin // Всичко руски семинар "Управленски проблеми" // Институт за управление на управлението. В.А. ТРПССНИКОВА РАС. - 2010. - №3.-MOP. 79-82.
Публикувано на AllBest.ru.
...Подобни документи
Методът на експериментално определяне на кривите на ускорението на контролния обект чрез регулиране и смущаване на резервоари за налягане. Динамични характеристики на контролния обект, математическо описание на динамиката с линейно диференциално уравнение.
лабораторна работа, добавена 12/14/2010
Сключването на уравнението на движението на махалото. Кинетична и потенциална енергия. Определяне на всички равновесни разпоредби. Проучване за стабилност. Аналитично и цифрово изчисляване на траекторията на системата. Изображението на системата траектория по различни начини.
допълнителна проверка 04/12/2016
Моделиране на непрекъсната система за управление, базирана на модела на матрицата на обекта на наблюдение. Намиране на функцията за прехвърляне на филтъра за входния процес. Изграждане на графиката на зависимостта на координатата и скоростта на времето, фазовата траектория на системата.
курсова работа, добавена 12/25/2013
Концепцията и същността на системата със структурна резервация. Класификация и разновидности. Описание на характеристиките на всяка от сортовете. Определяне на вероятността за здравословното състояние на обекта. Нивото на надеждност на обекта на резервацията, нейното изчисление.
курсова работа, добавена 03/05/2009
Концепцията за многокритериална оптимизация. Линейно и математическо програмиране, което дава числени решения на многоизмерни проблеми с ограничения. Решаване на задачата за класиране, за да определи оптималния обект въз основа на нейните определящи параметри.
резюме, добавен 31.05.2014
Разработване на метод за оценка на състоянието на хидравличен обект, изложен на наводнения от различен характер, използвайки теорията на размитите комплекти. Моделиране на възможен риск, за да се реши проблемът за зониране на крайбрежната територия.
допълнителна работа, добавена 07/23/2011
Аналитични и компютърни изследвания на уравнението и модела van der. Същност и характеристики на използването на EULER и Runge-Kutta 4 методи за поръчка. Сравнение на точността на EULER и метода Runge-Kutta на една диаграма, теглене на фаза от 1 точка.
работа на курса, добавена 06.10.2012
Математически модели на технически обекти и методи за тяхното прилагане. Анализ на електрическите процеси във веригата втори ред с помощта на MathCAD и Scilab компютърни математически системи. Математически модели и моделиране на технически обект.
курсова работа, добавена 03/08/2016
Основни определения. Алгоритъм решения. Неравенство с параметри. Основни определения. Алгоритъм решения. Това е само един от алгоритмите за решаване на неравенства с параметрите, използвайки координатната система на HOA.
курсова работа, добавена 11.12.2002
Изчисление Използване на MathCAD системата стойностите на функциите на изместване, скорост и ускоряване на ремаркето под влиянието на първоначалните им стойности, без да се вземат предвид смущаващата сила на пътните нередности. Оценка на ефекта на масата на ремаркето върху максималната амплитуда на трептенията.