გვერდი 1 2-დან
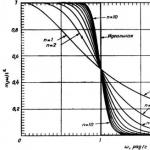
განვსაზღვროთ ფილტრის მიმდევრობა საჭირო პირობების მიხედვით სტოპში შესუსტების გრაფიკის მიხედვით G. Lam-ის წიგნში „ანალოგური და ციფრული ფილტრები“ ქ.8.1 გვ.215.
ნათელია, რომ მე-4 რიგის ფილტრი საკმარისია საჭირო შესუსტებისთვის. გრაფიკი ნაჩვენებია იმ შემთხვევისთვის, როდესაც w c \u003d 1 რად / წმ, და, შესაბამისად, სიხშირე, რომელზედაც საჭიროა აუცილებელი შესუსტება არის 2 რად / წმ (შესაბამისად 4 და 8 კჰც). ზოგადი სქემა Butterworth ფილტრის გადაცემის ფუნქციისთვის:

ჩვენ განვსაზღვრავთ ფილტრის მიკროსქემის განხორციელებას:
აქტიური მეოთხე რიგის დაბალი გამტარი ფილტრი რთული უარყოფითი გამოხმაურებით:

იმისათვის, რომ სასურველ წრეს ჰქონდეს სასურველი სიხშირის პასუხი, მასში შემავალი ელემენტები შეიძლება შეირჩეს არც თუ ისე მაღალი სიზუსტით, რაც ამ მიკროსქემის პლუსია.
მეოთხე რიგის აქტიური დაბალი გამტარი ფილტრი დადებითი გამოხმაურებით:

ამ წრეში საოპერაციო გამაძლიერებლის მომატებას უნდა ჰქონდეს მკაცრად განსაზღვრული მნიშვნელობა და ამ მიკროსქემის მოგება იქნება არაუმეტეს 3. ამიტომ, ეს წრე შეიძლება გაუქმდეს.
მე-4 რიგის აქტიური დაბალი გამტარი ფილტრი ომური უარყოფითი გამოხმაურებით

ეს ფილტრი აგებულია ოთხ ოპამპერზე, რაც ზრდის ხმაურს და ამ მიკროსქემის გამოთვლის სირთულეს, ამიტომ ჩვენ ასევე უარვყოფთ მას.
განხილული სქემებიდან ვირჩევთ ფილტრს რთული უარყოფითი გამოხმაურებით.
ფილტრის გაანგარიშება
გადაცემის ფუნქციის განსაზღვრა
ჩვენ ვწერთ კოეფიციენტების ცხრილის მნიშვნელობებს მეოთხე რიგის Butterworth ფილტრისთვის:
a 1 \u003d 1.8478 b 1 \u003d 1
a 2 \u003d 0.7654 b 2 \u003d 1
(იხ. W. Titze, K. Schenk "Semiconductor circuitry" ჩანართი. 13.6 გვ. 195)
გადაცემის ფუნქციის ზოგადი გამოხატულება მეოთხე რიგის დაბალი გამტარი ფილტრისთვის:

(იხ. W. Titze, K. Schenk "Semiconductor Circuitry" ცხრილი 13.2 გვ. 190 და ფორმა 13.4 გვ. 186).
პირველი ბმულის გადაცემის ფუნქციას აქვს ფორმა:

მეორე ბმულის გადაცემის ფუნქციას აქვს ფორმა:

სადაც w c არის ფილტრის გათიშვის წრიული სიხშირე, w c =2pf c .
ნაწილების დასახელების გამოთვლა
გამონათქვამების (2) და (3) კოეფიციენტების (1) კოეფიციენტებთან გაუტოლებით მივიღებთ:

მუდმივი სიგნალის გადაცემის კოეფიციენტები კასკადებისთვის, მათი ნამრავლი A 0 დავალების მიხედვით უნდა იყოს 10-ის ტოლი. ისინი უარყოფითია, რადგან ეს ეტაპები ინვერსიულია, მაგრამ მათი პროდუქტი იძლევა დადებით მოგებას.
მიკროსქემის გამოსათვლელად უმჯობესია დააყენოთ კონდენსატორების ტევადობა, ხოლო R 2-ის მნიშვნელობა რომ იყოს მართებული, უნდა დაკმაყოფილდეს პირობა.
 და შესაბამისად
და შესაბამისად 
ამ პირობებიდან გამომდინარე, არჩეულია C 1 \u003d C 3 \u003d 1 nF, C 2 \u003d 10 nF, C 4 \u003d 33 nF.
გამოთვალეთ წინააღმდეგობის მნიშვნელობები პირველი ეტაპისთვის:


მეორე ეტაპის წინააღმდეგობის მნიშვნელობები:


OU შერჩევა
ოპ-გამაძლიერებლის არჩევისას აუცილებელია გავითვალისწინოთ ფილტრის სიხშირის დიაპაზონი: ოპ-ამპერატორის ერთიანობის მომატების სიხშირე (რომელზეც მომატება უდრის ერთიანობას) უნდა იყოს მეტი, ვიდრე გათიშვის სიხშირის ნამრავლი. და ფილტრის მომატება K y.
ვინაიდან მაქსიმალური მომატება არის 3.33, ხოლო ათვლის სიხშირე 4 kHz, თითქმის ყველა არსებული ოპ-ამპერი აკმაყოფილებს ამ მდგომარეობას.
ოპ გამაძლიერებლის კიდევ ერთი მნიშვნელოვანი პარამეტრია მისი შეყვანის წინაღობა. ის უნდა იყოს ათჯერ მეტი, ვიდრე მიკროსქემის რეზისტორების მაქსიმალური წინააღმდეგობა.
მაქსიმალური წინააღმდეგობა წრედში არის 99.6 kOhm, ამიტომ op-amp-ის შეყვანის წინააღმდეგობა უნდა იყოს მინიმუმ 996 kOhm.
ასევე აუცილებელია OS-ის დატვირთვის სიმძლავრის გათვალისწინება. თანამედროვე ოპტიმალური ამპერატორებისთვის მინიმალური დატვირთვის წინააღმდეგობაა 2 kOhm. იმის გათვალისწინებით, რომ R1 და R4 წინააღმდეგობები არის 33.2 და 3.09 kΩ, შესაბამისად, საოპერაციო გამაძლიერებლის გამომავალი დენი, რა თქმა უნდა, იქნება მაქსიმალურ დასაშვებზე ნაკლები.
ზემოაღნიშნული მოთხოვნების შესაბამისად, ჩვენ ვირჩევთ OU K140UD601 შემდეგი პასპორტის მონაცემებით (მახასიათებლები):
კ წთ = 50000
R in = 1 MΩ
ბატერვორტის ფილტრის სიხშირის პასუხი აღწერილია განტოლებით
Butterworth-ის ფილტრის მახასიათებლები: არაწრფივი ფაზის პასუხი; ათვლის სიხშირე, დამოუკიდებელი ბოძების რაოდენობისგან; გარდამავალი პასუხის რხევითი ბუნება საფეხურიანი შეყვანის სიგნალით. ფილტრის რიგის მატებასთან ერთად იზრდება რხევითი ხასიათი.
ჩებიშევის ფილტრი
ჩებიშევის ფილტრის სიხშირის პასუხი აღწერილია განტოლებით
 ,
,
სადაც თ ნ 2 (ω/ω ნ ) არის ჩებიშევის მრავალწევრი ნ- ბრძანება.
ჩებიშევის პოლინომი გამოითვლება რეკურსიული ფორმულით
Chebyshev ფილტრის მახასიათებლები: გაიზარდა PFC არაერთგვაროვნება; ტალღოვანი მახასიათებელი ზოლში. რაც უფრო მაღალია ფილტრის გამტარი ზოლის ტალღოვანი ტალღა, მით უფრო მკვეთრი იქნება გადმოხვევა გარდამავალ რეგიონში იმავე თანმიმდევრობით. გარდამავალი რყევა საფეხურიანი შეყვანის სიგნალით უფრო მეტია, ვიდრე ბატერვორტის ფილტრით. Chebyshev ფილტრის ბოძების ხარისხის ფაქტორი უფრო მაღალია, ვიდრე Butterworth-ის ფილტრი.
ბესელის ფილტრი
ბესელის ფილტრის სიხშირის პასუხი აღწერილია განტოლებით
 ,
,
სადაც  ;ბ ნ 2
(ω/ω
cp თ )
არის ბესელის მრავალწევრი ნ- ბრძანება.
;ბ ნ 2
(ω/ω
cp თ )
არის ბესელის მრავალწევრი ნ- ბრძანება.
ბესელის მრავალწევრი გამოითვლება რეკურსიული ფორმულით
ბესელის ფილტრის მახასიათებლები: საკმაოდ ერთგვაროვანი სიხშირის პასუხი და ფაზური პასუხი, მიახლოებული გაუსის ფუნქციით; ფილტრის ფაზური ცვლა სიხშირის პროპორციულია, ე.ი. ფილტრს აქვს სიხშირეზე დამოუკიდებელი ჯგუფის შეფერხება. გათიშვის სიხშირე იცვლება ფილტრის ბოძების რაოდენობის ცვლილებით. ფილტრის სიხშირეზე პასუხის გაშვება ჩვეულებრივ უფრო ბრტყელია ვიდრე ბატერვორტისა და ჩებიშევის. ეს ფილტრი განსაკუთრებით კარგად შეეფერება იმპულსურ სქემებს და ფაზად მგრძნობიარე სიგნალის დამუშავებას.
კაუერის ფილტრი (ელიფსური ფილტრი)
კაუერის ფილტრის გადაცემის ფუნქციის ზოგადი ხედი
 .
.
Cauer-ის ფილტრის მახასიათებლები: არათანაბარი სიხშირის პასუხი გამტარ ზოლში და გაჩერების ზოლში; ყველა ზემოთ ჩამოთვლილი ფილტრის სიხშირის პასუხის ყველაზე მკვეთრი ვარდნა; ახორციელებს გადაცემის საჭირო ფუნქციებს უფრო მცირე ფილტრის რიგით, ვიდრე სხვა ტიპის ფილტრების გამოყენებისას.
ფილტრის რიგის განსაზღვრა
ფილტრის საჭირო თანმიმდევრობა განისაზღვრება ქვემოთ მოცემული ფორმულებით და მრგვალდება უახლოეს მთელ რიცხვამდე. Butterworth ფილტრის შეკვეთა
 .
.
ჩებიშევის ფილტრის შეკვეთა
 .
.
ბესელის ფილტრისთვის არ არსებობს შეკვეთის გამოთვლის ფორმულა; ამის ნაცვლად, მოცემულია ცხრილები, რომლებიც შეესაბამება ფილტრის წესრიგს დაყოვნების დროის მინიმალური აუცილებელი გადახრით მოცემულ სიხშირეზე და დანაკარგის დონე dB-ში).
ბესელის ფილტრის რიგის გაანგარიშებისას დაყენებულია შემდეგი პარამეტრები:
პროცენტული ტოლერანტობა ჯგუფური დაყოვნებისთვის მოცემულ სიხშირეზე ω ω cp თ ;
ფილტრის მომატების შესუსტების დონე dB-ში შეიძლება დაყენდეს სიხშირეზე. ω , ნორმალიზებული მიმართებით ω cp თ .
ამ მონაცემების საფუძველზე განისაზღვრება ბესელის ფილტრის საჭირო თანმიმდევრობა.
1-ლი და მე-2 რიგის დაბალი გამტარი ფილტრის კასკადების სქემები
ნახ. 12.4, 12.5 გვიჩვენებს LPF კასკადების ტიპურ სქემებს.


ა) ბ)
ბრინჯი. 12.4. Butterworth, Chebyshev და Bessel LPF კასკადები: ა - 1-ლი შეკვეთა; ბ -მე-2 შეკვეთა


ა) ბ)
ბრინჯი. 12.5. Cauer LPF კასკადები: ა - 1-ლი შეკვეთა; ბ -მე-2 შეკვეთა
პირველი და მე -2 რიგის LPF Butterworth, Chebyshev და Bessel-ის გადაცემის ფუნქციების ზოგადი ხედი.
 ,
, .
.
1-ლი და მე-2 რიგის Cauer LPF-ის გადაცემის ფუნქციების ზოგადი ხედი
 ,
,  .
.
მე-2 რიგის კაუერის ფილტრსა და ხაფანგის ფილტრს შორის მთავარი განსხვავება ისაა, რომ კაუერის ფილტრის გადაცემის ფუნქციაში სიხშირის თანაფარდობაა. Ω ს ≠ 1.
ბუტერვორტის, ჩებიშევისა და ბესელის LPF-ის გაანგარიშების მეთოდი
ეს ტექნიკა ეფუძნება ცხრილებში მოცემულ კოეფიციენტებს და მოქმედებს Butterworth, Chebyshev და Bessel ფილტრებისთვის. კეუერის ფილტრების გამოთვლის მეთოდი მოცემულია ცალკე. ბუტერვორტის, ჩებიშევისა და ბესელის LPF-ის გაანგარიშება იწყება მათი რიგის დადგენით. ყველა ფილტრისთვის დაყენებულია მინიმალური და მაქსიმალური შესუსტების პარამეტრები და ათვლის სიხშირე. Chebyshev ფილტრებისთვის დამატებით განისაზღვრება სიხშირეზე რეაგირების ტალღები გამშვებ ზოლში, ხოლო ბესელის ფილტრებისთვის ჯგუფის დაყოვნება. შემდეგი, განისაზღვრება ფილტრის გადაცემის ფუნქცია, რომლის აღება შესაძლებელია ცხრილებიდან და გამოითვლება მისი 1 და 2 რიგის კასკადები, შეინიშნება შემდეგი გაანგარიშების თანმიმდევრობა:
ფილტრის რიგისა და ტიპებიდან გამომდინარე, შეირჩევა მისი კასკადების სქემები, ხოლო ლუწი რიგის ფილტრი შედგება: ნ/ მე-2 რიგის 2 კასკადი და კენტი რიგის ფილტრი არის პირველი რიგის ერთი კასკადიდან და ( ნ– 1) / მე-2 რიგის 2 კასკადი;
1-ლი რიგის კასკადის გამოსათვლელად:
მნიშვნელობა განისაზღვრება ფილტრის შერჩეული ტიპისა და რიგით ბ 1 1-ლი რიგის კასკადი;
ოკუპირებული ფართობის შემცირებით, არჩეულია ტევადობის ნიშანი C და გათვლილი რფორმულის მიხედვით (შეგიძლიათ აირჩიოთ და რ, მაგრამ რეკომენდებულია არჩევა Cსიზუსტის გამო)
 ;
;
მოგება გამოითვლება რომ ზე U 1 1-ლი რიგის კასკადი, რომელიც განისაზღვრება მიმართებიდან
 ,
,
სადაც რომ ზე Uარის მთლიანი ფილტრის მოგება; რომ ზე U 2 , …, რომ ზე უნ- მე-2 რიგის კასკადური მიღწევები;
ამპლიფიკაციის განსახორციელებლად რომ ზე U 1 აუცილებელია რეზისტორების დაყენება შემდეგი ურთიერთობის საფუძველზე
რ ბ = რ ა ּ (რომ ზე U1 –1) .
მე-2 რიგის კასკადის გამოსათვლელად:
ოკუპირებული ტერიტორიის შემცირებით, შეირჩევა სიმძლავრეების დასახელებები C 1 = C 2 = C;
კოეფიციენტები შეირჩევა ცხრილების მიხედვით ბ 1 მედა ქ პიმე-2 რიგის კასკადებისთვის;
კონდენსატორების მოცემული მნიშვნელობის მიხედვით C რეზისტორები გამოითვლება რფორმულის მიხედვით
 ;
;
შერჩეული ფილტრის ტიპისთვის, თქვენ უნდა დააყენოთ შესაბამისი მომატება რომ ზე Ui = 3 – (1/ქ პი) მე-2 რიგის ყოველი საფეხურის, რეზისტორების დაყენებით, შემდეგი ურთიერთობის საფუძველზე
რ ბ = რ ა ּ (რომ ზე Ui –1) ;
ბესელის ფილტრებისთვის, გაამრავლეთ ყველა ტევადობის მნიშვნელობები საჭირო ჯგუფის დაგვიანებით.
ციფრული IIR ფილტრების თეორიის დიდი ნაწილი (ანუ უსასრულო იმპულსური პასუხის ფილტრები) მოითხოვს დროის უწყვეტი ფილტრის დიზაინის მეთოდების გაგებას. აქედან გამომდინარე, ამ განყოფილებაში მოცემულია რამდენიმე სტანდარტული ტიპის ანალოგური ფილტრების გაანგარიშების ფორმულები, მათ შორის Butterworth, Bessel და Chebyshev ტიპის I და II ფილტრები. ამ ფილტრების შესაბამისი მოცემული მახასიათებლების მიახლოების მეთოდების უპირატესობებისა და უარყოფითი მხარეების დეტალური ანალიზი შეგიძლიათ იხილოთ ანალოგური ფილტრების გამოთვლის მეთოდებზე მიძღვნილ უამრავ ნაშრომში, ასე რომ, ქვემოთ ჩვენ მხოლოდ მოკლედ ჩამოვთვლით თითოეული ტიპის ფილტრების ძირითად თვისებებს. და მიეცით გამოთვლილი კოეფიციენტები, რომლებიც აუცილებელია ანალოგური ფილტრის კოეფიციენტების მისაღებად.
საჭირო გახდეს ნორმალიზებული დაბალი გამტარი ფილტრის გამოთვლა Ω = 1 რად/წმ-ის ტოლი ათვლის სიხშირით. ამპლიტუდის მახასიათებლის კვადრატი ჩვეულებრივ გამოყენებული იქნება მიახლოებით ფუნქციად (გამონაკლისია ბესელის ფილტრი). ჩვენ ვვარაუდობთ, რომ ანალოგური ფილტრის გადაცემის ფუნქცია არის შემდეგი ფორმის S ცვლადის რაციონალური ფუნქცია:
Butterworth-ის დაბალი გამტარი ფილტრები ხასიათდება იმით, რომ მათ აქვთ ყველაზე გლუვი ამპლიტუდის რეაქცია საწყისზე s- სიბრტყეში. ეს ნიშნავს, რომ წარმოშობისთვის დამახასიათებელი ამპლიტუდის ყველა არსებული წარმოებული ნულის ტოლია. ნორმალიზებული (ანუ, 1 რად/წმ ათვლის სიხშირის მქონე) ბუტერვორტის ფილტრის ამპლიტუდის პასუხის კვადრატი არის:
სადაც ნ - ფილტრის შეკვეთა. ანალიტიკურად გავაგრძელოთ ფუნქცია (14.2) მთელ S სიბრტყეზე, მივიღებთ
ყველა პოლუსი (14.3) არის ერთეულის წრეზე ერთმანეთისგან იმავე მანძილზე S- თვითმფრინავი . ჩვენ გამოვხატავთ გადაცემის ფუნქციას H(s) მარცხენა ნახევარსიბრტყეში მდებარე ბოძების მეშვეობით ს :
სად (14.4)
სადაც k =1,2…..n (14.5)
ა k 0 - ნორმალიზაციის მუდმივი. ფორმულების (14.2) და (14.5) გამოყენებით, ჩვენ შეგვიძლია ჩამოვაყალიბოთ დაბალი გამტარი Butterworth ფილტრების რამდენიმე თვისება.
Butterworth Low Pass ფილტრების თვისებები:
1. ბუტერვორტის ფილტრებს აქვთ მხოლოდ პოლუსები (ამ ფილტრების გადაცემის ფუნქციების ყველა ნული მდებარეობს უსასრულობაში).
2. Ω=1 რად/წმ სიხშირეზე ბატერვორტის ფილტრის მომატება ტოლია (ანუ ათვლის სიხშირეზე მათი ამპლიტუდის მახასიათებელი მცირდება 3 დბ-ით).
3. ფილტრის შეკვეთა ნ მთლიანად განსაზღვრავს მთელ ფილტრს. პრაქტიკაში, ბატერვორტის ფილტრის რიგი ჩვეულებრივ გამოითვლება გარკვეული შესუსტების უზრუნველყოფის პირობით ზოგიერთ მოცემულ სიხშირეზე Ω t > 1. ფილტრის რიგი, რომელიც უზრუნველყოფს Ω= Ω t სიხშირეს.< уровень амплитудной характеристики, равный 1/А, можно найти из соотношения
ბრინჯი. 14.1. ბატერვორტის ანალოგური დაბალი გამტარი ფილტრის ბოძების განლაგება.
ბრინჯი. 14.2- ამპლიტუდის და ფაზის მახასიათებლები, აგრეთვე ანალოგური დაბალი გამტარი ბუტერვორტის ფილტრის ჯგუფური დაყოვნების მახასიათებელი.
მოდით, მაგალითად, საჭიროა სიხშირით Ω t = 2 რად/წმუზრუნველყოს შესუსტება ტოლი A = 100. შემდეგ
დამრგვალება ნ მთელ რიცხვამდე, ჩვენ აღმოვაჩენთ, რომ მოცემული შესუსტება უზრუნველყოფს მე-7 რიგის ბატერვორტის ფილტრს.
გადაწყვეტილება. დიზაინის მახასიათებლების გამოყენებით 1/A == 0.0005 (შეესაბამება 66 დბ შესუსტებას) და Ω t = 2, ვიღებთ ნ== 10.97. დამრგვალება იძლევა n = 11. ნახ. 14.1 გვიჩვენებს ბუტერვორტის გამოთვლილი ფილტრის პოლუსების განლაგებას s- თვითმფრინავი. ამპლიტუდის (ლოგარითმული მასშტაბით) და ფაზის მახასიათებლები, ისევე როგორც ამ ფილტრისთვის დამახასიათებელი ჯგუფის დაყოვნება, ნაჩვენებია ნახ. 14.2.
ბუტერვორტის ფილტრი
Butterworth Low Pass ფილტრის გადაცემის ფუნქცია ნ- რიგითი ხასიათდება გამოთქმით:
ბუტერვორტის ფილტრის სიხშირის პასუხს აქვს შემდეგი თვისებები:
1) ნებისმიერი თანმიმდევრობით ნსიხშირის პასუხის მნიშვნელობა
2) ათვლის სიხშირეზე u=u s
დაბალი გამტარი ფილტრის სიხშირის პასუხი სიხშირის მატებასთან ერთად მონოტონურად მცირდება. ამ მიზეზით, ბუტერვორტის ფილტრებს უწოდებენ ფილტრებს ყველაზე ბრტყელი მახასიათებლებით. სურათი 3 გვიჩვენებს ბატერვორტის დაბალი გამტარი ფილტრის ამპლიტუდა-სიხშირის მახასიათებლების გრაფიკებს 1-5 ბრძანებით. ცხადია, რაც უფრო მაღალია ფილტრის რიგი, მით უფრო ზუსტად არის მიახლოებული იდეალური დაბალი გამტარი ფილტრის სიხშირის პასუხი.

სურათი 3 - სიხშირის პასუხი Butterworth-ის დაბალი გამტარი ფილტრისთვის 1-დან 5-მდე
სურათი 4 გვიჩვენებს Butterworth HPF-ის სქემატურ განხორციელებას.

სურათი 4 - HPF-II Butterworth
Butterworth-ის ფილტრის უპირატესობა არის ყველაზე გლუვი სიხშირის პასუხი გამტარ სიხშირეებზე და მისი შემცირება თითქმის ნულამდე ჩახშობის ზოლის სიხშირეებზე. ბატერვორტის ფილტრი ერთადერთია, რომელიც ინარჩუნებს სიხშირის პასუხის ფორმას უფრო მაღალი ბრძანებებისთვის (გარდა უფრო ციცაბო ჩამორთმევისა კვეთაზე), ხოლო სხვა მრავალი ტიპის ფილტრს (ბესელის ფილტრი, ჩებიშევის ფილტრი, ელიფსური ფილტრი) განსხვავებული ფორმა აქვს. სიხშირეზე რეაგირება სხვადასხვა ბრძანებით.
თუმცა, Chebyshev ტიპის I და II ფილტრებთან ან ელიფსურ ფილტრებთან შედარებით, Butterworth-ის ფილტრს აქვს უფრო ბრტყელი ჩამორთმევა და, შესაბამისად, უნდა იყოს უფრო მაღალი რიგის (რაც უფრო რთული შესასრულებელია), რათა უზრუნველყოს სასურველი შესრულება წყვეტის სიხშირეებზე.
ჩებიშევის ფილტრი
ჩებიშევის ფილტრის გადაცემის ფუნქციის მოდულის კვადრატი მოცემულია:
სად არის ჩებიშევის მრავალწევრი. ჩებიშევის ფილტრის გადაცემის ფუნქციის მოდული უდრის ერთს იმ სიხშირეებზე, სადაც ის ქრება.
Chebyshev ფილტრები ჩვეულებრივ გამოიყენება იქ, სადაც საჭიროა სიხშირის რეაგირების საჭირო მახასიათებლების მიწოდება დაბალი რიგის ფილტრით, კერძოდ, კარგი სიხშირის ჩახშობა ჩახშობის ზოლიდან, ხოლო სიხშირის პასუხის სიგლუვეს გამტარ ზოლზე და ჩახშობის სიხშირეებზე არც ისე მნიშვნელოვანია. .
არსებობს Chebyshev ფილტრები I და II გვარები.
ჩებიშევის ფილტრი პირველი ტიპის. ეს არის ჩებიშევის ფილტრების უფრო გავრცელებული მოდიფიკაცია. ასეთი ფილტრის გამშვებ ზოლში ჩანს ტალღები, რომელთა ამპლიტუდა განისაზღვრება ტალღოვანი ინდექსით ე. ანალოგური ელექტრონული ჩებიშევის ფილტრის შემთხვევაში მისი რიგი უდრის მის განხორციელებაში გამოყენებული რეაქტიული კომპონენტების რაოდენობას. მახასიათებლის უფრო მკვეთრი დაშლა შეიძლება მიღებულ იქნას, თუ ტალღები დაშვებულია არა მხოლოდ უღელტეხილზე, არამედ ჩახშობის ზოლშიც, კომპლექსურ სიბრტყეში წარმოსახვით ღერძზე jsh ფილტრის გადაცემის ფუნქციაზე ნულების დამატებით. თუმცა, ეს გამოიწვევს ნაკლებად ეფექტურ ჩახშობას ჩახშობის ზოლში. შედეგად მიღებული ფილტრი არის ელიფსური ფილტრი, რომელიც ასევე ცნობილია როგორც Cauer filter.
პირველი ტიპის მეოთხე რიგის ჩებიშევის დაბალი გამტარი ფილტრის სიხშირის პასუხი ნაჩვენებია სურათზე 5.

სურათი 5 - მეოთხე რიგის პირველი ტიპის ჩებიშევის დაბალი გამტარი ფილტრის სიხშირის პასუხი
ჩებისევის ტიპის II ფილტრი (შებრუნებული ჩებიშევის ფილტრი) გამოიყენება ნაკლებად ხშირად, ვიდრე I ტიპის ჩებიშევის ფილტრი ამპლიტუდის რეაქციის ნაკლებად ციცაბო ჩამორთმევის გამო, რაც იწვევს კომპონენტების რაოდენობის ზრდას. მას არ აქვს ტალღოვანი ზოლში, მაგრამ იმყოფება ჩახშობის ზოლში.
მეოთხე რიგის მეორე ტიპის ჩებიშევის დაბალი გამტარი ფილტრის სიხშირის პასუხი ნაჩვენებია სურათზე 6.

სურათი 6 - სიხშირის პასუხი ჩებიშევის დაბალი გამტარი ფილტრისთვის მეორე სახის
სურათი 7 გვიჩვენებს I და II ბრძანებების Chebyshev HPF-ის მიკროსქემის დანერგვას.


სურათი 7 - Chebyshev HPF: ა) ვბრძანებ; ბ) II ბრძანება
ჩებიშევის ფილტრების სიხშირის მახასიათებლების თვისებები:

1) გამშვებ ზოლში სიხშირის პასუხს აქვს თანაბარი ტალღის ხასიათი. ინტერვალზე (-1? u? 1) არის ნწერტილები, რომლებშიც ფუნქცია აღწევს 1-ის მაქსიმალურ მნიშვნელობას ან მინიმალურ მნიშვნელობას. თუ n კენტია, თუ n ლუწი;
2) ჩებიშევის ფილტრის სიხშირის პასუხის მნიშვნელობა წყვეტის სიხშირეზე არის

3)-ისთვის ფუნქცია მონოტონურად მცირდება და მიისწრაფვის ნულისკენ.
4) პარამეტრი e განსაზღვრავს ჩებიშევის ფილტრის სიხშირის პასუხის უთანასწორობას გამშვებ ზოლში:
ბატერვორტისა და ჩებიშევის ფილტრების სიხშირეზე პასუხის შედარება აჩვენებს, რომ ჩებიშევის ფილტრი უფრო მეტ შესუსტებას უზრუნველყოფს გამშვებ ზოლში, ვიდრე იმავე რიგის ბატერვორტის ფილტრი. Chebyshev ფილტრების მინუსი არის ის, რომ მათი ფაზა-სიხშირის მახასიათებლები გამშვებ ზოლში მნიშვნელოვნად განსხვავდება ხაზოვანისგან.
ბუტერვორტისა და ჩებიშევის ფილტრებისთვის არის დეტალური ცხრილები, რომლებიც აჩვენებენ პოლუსების კოორდინატებს და სხვადასხვა ორდერის გადაცემის ფუნქციების კოეფიციენტებს.
უკრაინის განათლებისა და მეცნიერების სამინისტრო
ხარკოვის რადიო ელექტრონიკის ეროვნული უნივერსიტეტი
REU დეპარტამენტი
საკურსო სამუშაო
ანგარიშსწორება და განმარტებითი შენიშვნა
BUTTERWORTH HIGH PASS ფილტრი
ხარკოვი 2008 წ
ტექნიკური დავალება
შექმენით მაღალგამტარი ფილტრი (HPF) ამპლიტუდა-სიხშირის მახასიათებლის (AFC) მიახლოებით Butterworth-ის პოლინომით, განსაზღვრეთ ფილტრის საჭირო რიგი, თუ დაყენებულია AFC პარამეტრები (ნახ. 1): K 0 = 26dB
U m Vx \u003d 250 mV
სად არის მაქსიმალური ფილტრის მომატება;
მინიმალური მომატება გამტარუნარიანობაში;
ფილტრის მაქსიმალური მომატება შეფერხების ზოლში;
შეწყვეტის სიხშირე;
სიხშირე, საიდანაც ფილტრის მომატება ნაკლებია.

სურათი 1 - Butterworth HPF შაბლონი.
უზრუნველყოს მცირე მგრძნობელობა ელემენტების რეიტინგებში გადახრების მიმართ.
ესეიგი
დასახლება და ახსნა-განმარტება: 26 გვ., 11 სურ., 6 ჩაბ.
სამუშაოს მიზანი: აქტიური მაღალგამტარი RC ფილტრის სქემის სინთეზი და მისი კომპონენტების გამოთვლა.
კვლევის მეთოდი: ფილტრის სიხშირის პასუხის დაახლოება ბატერვორტის პოლინომით.
გადაცემის სავარაუდო ფუნქცია ხორციელდება აქტიური ფილტრის გამოყენებით. ფილტრი აგებულია კასკადური დამოუკიდებელი ბმულებით. აქტიური ფილტრები იყენებენ სასრული მოპოვების არაინვერსიულ გამაძლიერებლებს, რომლებიც დანერგილია ოპერაციული გამაძლიერებლების გამოყენებით.
სამუშაოს შედეგები შეიძლება გამოყენებულ იქნას რადიოინჟინერიისა და საყოფაცხოვრებო აღჭურვილობის ფილტრების სინთეზისთვის.
შესავალი
1. მსგავსი სქემების მიმოხილვა
3.1 HPF ნორმალიზაციის განხორციელება
3.2 საჭირო ფილტრის რიგის დადგენა
3.3 ბატერვორტის მრავალწევრის განმარტება
3.4 საპირისპირო გადასვლა ნორმალიზებულიდან პროგნოზირებულ HPF-ზე
3.5 გადაცემის ფუნქციიდან წრედზე გადასვლა
3.6 გადაცემის ფუნქციიდან წრედზე გადასვლა
4. მიკროსქემის ელემენტების გაანგარიშება
5. შემუშავებული ფილტრის მორგების ტექნიკა
შესავალი
ბოლო დრომდე, ციფრული და ანალოგური მოწყობილობების შედარების შედეგები რადიო აღჭურვილობასა და ტელეკომუნიკაციის ტექნიკურ საშუალებებში არ იწვევდა უკმაყოფილების განცდას. ციფრული კვანძები, რომლებიც განხორციელდა ინტეგრირებული სქემების (ICs) ფართო გამოყენებით, დადებითად განსხვავდებოდა მათი კონსტრუქციული და ტექნოლოგიური სისრულით. განსხვავებული სიტუაცია იყო ანალოგური სიგნალის დამუშავების კვანძებთან დაკავშირებით, რომლებიც, მაგალითად, ტელეკომუნიკაციებში შეადგენდნენ საკომუნიკაციო აღჭურვილობის მოცულობის და მასის 40-დან 60%-მდე. მოცულობითი, დიდი რაოდენობით არასაიმედო და შრომატევადი გრაგნილი ელემენტების შემცველობით, ისინი იმდენად დამთრგუნველი ჩანდნენ დიდი ინტეგრირებული სქემების ფონზე, რომ მათ წარმოუდგინეს მოსაზრება უამრავ ექსპერტს შორის ელექტრონული აღჭურვილობის "ტოტალური დიგიტალიზაციის" აუცილებლობის შესახებ.
თუმცა ამ უკანასკნელს, ისევე როგორც ნებისმიერ სხვა უკიდურესობას, არ მოჰყოლია (და ვერც) მოსალოდნელის ადეკვატური შედეგები. სიმართლე, როგორც ყველა სხვა შემთხვევაში, სადღაც შუაში იყო. რიგ შემთხვევებში, ფუნქციურ ანალოგურ ერთეულებზე აგებული აღჭურვილობა, რომლის ელემენტარული საფუძველი ადეკვატურია მიკროელექტრონიკის შესაძლებლობებსა და შეზღუდვებზე, უფრო ეფექტური აღმოჩნდება.
ადეკვატურობა ამ შემთხვევაში შეიძლება უზრუნველყოფილი იყოს აქტიურ RC სქემებზე გადასვლით, რომლის ელემენტარული საფუძველი არ მოიცავს ინდუქტორებს და ტრანსფორმატორებს, რომლებიც ფუნდამენტურად არ არის დანერგილი მიკროელექტრონული საშუალებებით.
ასეთი გადასვლის მართებულობა ამჟამად განისაზღვრება, ერთის მხრივ, აქტიური RC სქემების თეორიის მიღწევებით და, მეორე მხრივ, მიკროელექტრონიკის წარმატებით, რომელმაც დეველოპერებს მიაწოდა მაღალი ხარისხის ხაზოვანი ინტეგრირებული სქემები. , მათ შორის ინტეგრირებული ოპერატიული გამაძლიერებლები (op-amps). ამ ოპერაციული გამაძლიერებლები, რომლებსაც აქვთ დიდი ფუნქციონირება, მნიშვნელოვნად ამდიდრებენ ანალოგურ სქემებს. ეს განსაკუთრებით აშკარა იყო აქტიური ფილტრების წრედში.
60-იან წლებამდე ფილტრების დასანერგად ძირითადად პასიურ ელემენტებს იყენებდნენ, ე.ი. ინდუქტორები, კონდენსატორები და რეზისტორები. ასეთი ფილტრების დანერგვის მთავარი პრობლემა არის ინდუქტორების ზომა (დაბალ სიხშირეზე ისინი ძალიან ნაყარი ხდებიან). 60-იან წლებში ინტეგრირებული ოპერაციული გამაძლიერებლების შემუშავებით, გამოჩნდა ახალი მიმართულება ოპ-ამპერებზე დაფუძნებული აქტიური ფილტრების დიზაინში. აქტიური ფილტრები იყენებენ რეზისტორებს, კონდენსატორებს და ოპ-ამპერებს (აქტიური კომპონენტები), მაგრამ მათ არ აქვთ ინდუქტორები. მომავალში, აქტიურმა ფილტრებმა თითქმის მთლიანად შეცვალა პასიური. ამჟამად, პასიური ფილტრები გამოიყენება მხოლოდ მაღალ სიხშირეებზე (1 MHz ზემოთ), ყველაზე ფართოდ გამოყენებული ოპ ამპერატორების სიხშირის დიაპაზონის მიღმა. მაგრამ ბევრ მაღალსიხშირულ მოწყობილობაშიც კი, როგორიცაა რადიო გადამცემები და მიმღებები, ტრადიციული RLC ფილტრები იცვლება კვარცის და ზედაპირული აკუსტიკური ტალღის ფილტრებით.
ახლა, ხშირ შემთხვევაში, ანალოგური ფილტრები იცვლება ციფრულით. ციფრული ფილტრების მუშაობა ძირითადად უზრუნველყოფილია პროგრამული უზრუნველყოფით, ამიტომ ისინი ბევრად უფრო მოქნილი არიან ანალოგებთან შედარებით. ციფრული ფილტრების დახმარებით შესაძლებელია ისეთი გადაცემის ფუნქციების რეალიზება, რომელთა მიღება ძალიან რთულია ჩვეულებრივი მეთოდებით. თუმცა, ციფრული ფილტრები ჯერ ვერ შეცვლის ანალოგურ ფილტრებს ყველა სიტუაციაში, ამიტომ რჩება ყველაზე პოპულარული ანალოგური ფილტრების - აქტიური RC ფილტრების საჭიროება.
1. მსგავსი სქემების მიმოხილვა
ფილტრები არის სიხშირის შერჩევითი მოწყობილობები, რომლებიც გადასცემენ ან აყოვნებენ სიგნალებს გარკვეული სიხშირის დიაპაზონში.
ფილტრები შეიძლება დაიყოს მათი სიხშირის პასუხის მიხედვით:
1. დაბალი გამტარი ფილტრები (LPF) - გადის ყველა რხევას სიხშირით, რომელიც არ აღემატება გარკვეულ ათვლის სიხშირეს და მუდმივ კომპონენტს.
2. მაღალგამტარი ფილტრები (LPF) - გადის ყველა ვიბრაციას არანაკლებ გარკვეული ათვლის სიხშირეზე.
3. Band-pass filters (BPF) - გადის რხევები სიხშირის გარკვეულ დიაპაზონში, რომელიც განისაზღვრება სიხშირის პასუხის გარკვეული დონით.
4. ზოლის გაჩერების ფილტრები (BPF) - აყოვნებს რხევებს სიხშირის გარკვეულ დიაპაზონში, რომელიც განისაზღვრება სიხშირის პასუხის გარკვეული დონით.
5. Notch filters (RF) - BPF-ის ტიპი, რომელსაც აქვს დაყოვნების ვიწრო ზოლი და მას ასევე უწოდებენ საცობ ფილტრს.
6. ფაზის ფილტრები (FF) - იდეალურად აქვთ გადაცემის მუდმივი კოეფიციენტი ყველა სიხშირეზე და შექმნილია შეყვანის სიგნალების ფაზის შესაცვლელად (კერძოდ, სიგნალების დროის დაყოვნებისთვის).

სურათი 1.1 - ფილტრების ძირითადი ტიპები
აქტიური RC ფილტრებით შეუძლებელია სიხშირეზე პასუხის იდეალური ფორმის მიღწევა ნახაზი 1.1-ზე ნაჩვენები მართკუთხედების სახით, მკაცრად მუდმივი მომატებით გამტარ ზოლში, უსასრულო შესუსტება ჩახშობის ზოლში და გორგალის უსასრულო ციცაბო. გადასასვლელიდან ჩახშობის ზოლამდე. აქტიური ფილტრის დიზაინი ყოველთვის არის კომპრომისი მახასიათებლის იდეალურ ფორმასა და მისი განხორციელების სირთულეს შორის. ამას ეწოდება "დაახლოების პრობლემა". ხშირ შემთხვევაში, ფილტრაციის ხარისხის მოთხოვნები შესაძლებელს ხდის პირველი და მეორე რიგის უმარტივესი ფილტრებით გატარებას. ასეთი ფილტრების ზოგიერთი სქემა წარმოდგენილია ქვემოთ. ფილტრის დაპროექტება ამ შემთხვევაში დამოკიდებულია მიკროსქემის არჩევაზე ყველაზე შესაფერისი კონფიგურაციით და შემდეგ ელემენტის რეიტინგების მნიშვნელობების გამოთვლაზე კონკრეტული სიხშირეებისთვის.
თუმცა, არის სიტუაციები, როდესაც ფილტრაციის მოთხოვნები შეიძლება იყოს ბევრად უფრო მკაცრი და შეიძლება საჭირო გახდეს უფრო მაღალი რიგის სქემები, ვიდრე პირველი და მეორე. მაღალი დონის ფილტრების დაპროექტება უფრო რთული ამოცანაა, რაც ამ კურსის მუშაობის საგანია.
ქვემოთ მოცემულია პირველი მეორე რიგის რამდენიმე ძირითადი სქემა თითოეული მათგანის უპირატესობებისა და უარყოფითი მხარეების აღწერით.
1. LPF-I და HPF-I, რომელიც დაფუძნებულია არაინვერსიულ გამაძლიერებელზე.

სურათი 1.2 - ფილტრები, რომლებიც დაფუძნებულია არაინვერსიულ გამაძლიერებელზე:
ა) LPF-I, ბ) HPF-I.
ფილტრის სქემების უპირატესობებს შეიძლება მივაკუთვნოთ ძირითადად განხორციელების და დარეგულირების სიმარტივე, ნაკლოვანებები არის სიხშირის მახასიათებლების დაბალი ციცაბო და არ არის ძალიან მდგრადი თვითაგზნების მიმართ.
2. LPF-II და HPF-II მრავალ მარყუჟის გამოხმაურებით.

სურათი 1.3 - ფილტრები მრავალსაფეხურიანი გამოხმაურებით:
ა) LPF-II, ბ) HPF-II.
ცხრილი 2.1 - LPF-II-ის უპირატესობები და უარყოფითი მხარეები მრავალსაფეხურიანი გამოხმაურებით
ცხრილი 2.2 - HPF-II-ის უპირატესობები და უარყოფითი მხარეები მრავალ მარყუჟის გამოხმაურებით
2. LPF-II და HPF-II Sallen-Key.

სურათი 1.4 - Sallen-Kay ფილტრები:
ა) LPF-II, ბ) HPF-II
ცხრილი 2.3 - LPF-II Sallen-Kay-ის უპირატესობები და უარყოფითი მხარეები.
ცხრილი 2.4 - Sallen-Kay HPF-II-ის უპირატესობები და უარყოფითი მხარეები.
3. LPF-II და HPF-II დაფუძნებული წინაღობის გადამყვანებზე.


სურათი 1.5 - LPF II წრე, რომელიც დაფუძნებულია წინაღობის გადამყვანებზე:
ა) LPF-II, ბ) HPF-II.
ცხრილი 2.3 - LPF-II და HPF-II-ის უპირატესობები და უარყოფითი მხარეები წინაღობის გადამყვანების საფუძველზე.
2. ფილტრის სქემის შერჩევა და დასაბუთება
ფილტრის დიზაინის მეთოდები განსხვავდება დიზაინის მახასიათებლებით. პასიური RC ფილტრების დიზაინი დიდწილად განისაზღვრება ბლოკ-სქემით
აქტიური AF ფილტრები მათემატიკურად არის აღწერილი გადაცემის ფუნქციით. გადაცემის ფუნქციის მრავალწევრების სახელები მოცემულია სიხშირის პასუხის ტიპებს. თითოეული ტიპის სიხშირეზე რეაგირება ხორციელდება გარკვეული რაოდენობის ბოძებით (RC სქემები) მითითებული სიხშირის პასუხის დახრილობის შესაბამისად. ყველაზე ცნობილია ბუტერვორტის, ბესელის, ჩებიშევის მიახლოებები.
ბუტერვორტის ფილტრს აქვს ყველაზე ბრტყელი სიხშირის პასუხი, ჩახშობის ზოლში გარდამავალი მონაკვეთის დახრილობა არის 6 დბ/ოქტ პოლუსზე, მაგრამ მას აქვს არაწრფივი ფაზის პასუხი, შეყვანის იმპულსური ძაბვა იწვევს გამომავალზე რხევებს. ფილტრი გამოიყენება უწყვეტი სიგნალებისთვის.
ბესელის ფილტრს აქვს ხაზოვანი ფაზის პასუხი, სიხშირის პასუხის გარდამავალი მონაკვეთის მცირე დახრილობა. გამშვები ზოლის ყველა სიხშირის სიგნალებს აქვთ დროის ერთნაირი დაყოვნება, ამიტომ იგი შესაფერისია კვადრატული ტალღის იმპულსების გასაფილტრად, რომლებიც უნდა გაიგზავნოს დამახინჯების გარეშე.
Chebyshev ფილტრი - თანაბარი ტალღების ფილტრი ერთობლივ საწარმოში, მის გარეთ ბრტყელი ფორმის მასები, შესაფერისია უწყვეტი სიგნალებისთვის იმ შემთხვევებში, როდესაც ქუდები უნდა ჰქონდეს სიხშირის პასუხის ციცაბო ფერდობზე წყვეტის სიხშირის უკან.
პირველი და მეორე რიგის მარტივი ფილტრის სქემები გამოიყენება მხოლოდ მაშინ, როდესაც არ არსებობს მკაცრი მოთხოვნები ფილტრაციის ხარისხზე.
ფილტრის სექციების კასკადური კავშირი ხორციელდება იმ შემთხვევაში, თუ ფილტრის შეკვეთა საჭიროა მეორეზე მაღალი, ანუ, როდესაც აუცილებელია გადაცემის მახასიათებლის ჩამოყალიბება ჩახშობილ ზოლში სიგნალების ძალიან დიდი შესუსტებით და დიდი დახრილობით. სიხშირის პასუხის შესუსტება მიღებული გადაცემის ფუნქცია მიიღება ნაწილობრივი გადაცემის კოეფიციენტების გამრავლებით
ჯაჭვები აგებულია იმავე სქემის მიხედვით, მაგრამ ელემენტების მნიშვნელობებით
R, C განსხვავებულია და დამოკიდებულია ფილტრისა და მისი ზოლების გათიშვის სიხშირეებზე: f sp.f / f sp.l
ამასთან, უნდა გვახსოვდეს, რომ კასკადური, მაგალითად, ორი მეორე რიგის Butterworth ფილტრი არ იძლევა მეოთხე რიგის Butterworth ფილტრს, რადგან შედეგად ფილტრს ექნება განსხვავებული ათვლის სიხშირე და განსხვავებული სიხშირის პასუხი. აქედან გამომდინარე, აუცილებელია ცალკეული ბმულების კოეფიციენტების არჩევა ისე, რომ გადაცემის ფუნქციების შემდეგი პროდუქტი შეესაბამებოდეს მიახლოების არჩეულ ტიპს. ამრიგად, AF– ის დიზაინი გამოიწვევს სირთულეებს იდეალური მახასიათებლის მოპოვებისა და მისი განხორციელების სირთულის თვალსაზრისით.
თითოეული ბმულის ძალიან დიდი შეყვანის და მცირე გამომავალი წინაღობის გამო, არ არის მოცემული გადაცემის ფუნქციის დამახინჯება და თითოეული რგოლის დამოუკიდებელი რეგულირების შესაძლებლობა. ბმულების დამოუკიდებლობა შესაძლებელს ხდის თითოეული ბმულის თვისებების ფართო რეგულირებას მისი პარამეტრების შეცვლით.
ფუნდამენტურად არ აქვს მნიშვნელობა, რა თანმიმდევრობით განთავსდება ნაწილობრივი ფილტრები, რადგან მიღებული გადაცემის ფუნქცია ყოველთვის იგივე იქნება. თუმცა, არსებობს სხვადასხვა პრაქტიკული რეკომენდაციები ნაწილობრივი ფილტრების შეერთების წესრიგთან დაკავშირებით. მაგალითად, თვითაგზნებისგან თავის დასაცავად, ბმულების თანმიმდევრობა უნდა იყოს ორგანიზებული ნაწილობრივი შეზღუდვის სიხშირის ზრდის მიხედვით. სხვა ბრძანებამ შეიძლება გამოიწვიოს მეორე რგოლის თვითაგზნება მისი სიხშირის რეაქციის პიკის რეგიონში, რადგან უფრო მაღალი შემზღუდველი სიხშირის მქონე ფილტრებს ჩვეულებრივ აქვთ უმაღლესი ხარისხის ფაქტორი შემზღუდველი სიხშირის რეგიონში.
კიდევ ერთი კრიტერიუმი დაკავშირებულია მინიმიზაციის მოთხოვნებთან, შეყვანის ხმაურის დონესთან. ამ შემთხვევაში, ბმულების თანმიმდევრობა იცვლება, რადგან ფილტრი მინიმალური წყვეტის სიხშირით აქვეითებს ხმაურის დონეს, რომელიც წარმოიქმნება კასკადის წინა ბმულებიდან.
3. ტოპოლოგიური ფილტრის მოდელი და ძაბვის გადაცემის ფუნქცია
3.1 ამ პარაგრაფში შეირჩევა Butterworth HPF-ის რიგი და მისი გადაცემის ფუნქციის ტიპი განისაზღვრება ToR-ში მითითებული პარამეტრების მიხედვით:


სურათი 2.1 - HPF შაბლონი მითითებების მიხედვით.
ტოპოლოგიური ფილტრის მოდელი.

3.2 HPF-ის ნორმალიზაციის განხორციელება
მინიჭების პირობის მიხედვით, ჩვენ ვპოულობთ სასაზღვრო პირობებს ფილტრის სიხშირისთვის, რომელიც გვჭირდება. და ჩვენ ნორმალიზდება გადაცემის კოეფიციენტისთვის და სიხშირისთვის.
გადაცემის კოეფიციენტის მიღმა:
K max \u003d K 0 -K p \u003d 26-23 \u003d 3dB
K min \u003d K 0 -K s \u003d 26- (-5) \u003d 31 dB
სიხშირის მიხედვით:

3.3 ფილტრის საჭირო რიგის დადგენა

n-ის დამრგვალება უახლოეს მთელ რიცხვზე: n = 3.
ამრიგად, შაბლონით მოცემული მოთხოვნების დასაკმაყოფილებლად საჭიროა მესამე რიგის ფილტრი.
3.4 ბატერვორტის მრავალწევრის განმარტება
ბატერვორტის ფილტრების ნორმალიზებული გადაცემის ფუნქციების ცხრილის მიხედვით ვხვდებით მესამე რიგის ბატერვორტის პოლინომს:

3.5 საპირისპირო გადასვლა ნორმალიზებულიდან პროგნოზირებულ HPF-ზე
მოდით განვახორციელოთ საპირისპირო გადასვლა ნორმალიზებული HPF-დან პროგნოზირებულ HPF-ზე.
სკალირება გადაცემის კოეფიციენტით:
სიხშირის სკალირება:
ჩვენ ვაკეთებთ ჩანაცვლებას
სკალირების შედეგად ვიღებთ გადაცემის ფუნქციას W(p) სახით:


სურათი 2.2 - შექმნილი HPF Butterworth-ის სიხშირის პასუხი.
3.6 გადაცემის ფუნქციიდან წრედზე გადასვლა
მოდით წარმოვადგინოთ მესამე რიგის HPF-ის გადაცემის ფუნქცია, რომელიც შექმნილია, როგორც პირველი და მეორე რიგის ორი აქტიური HPF-ის გადაცემის ფუნქციის პროდუქტი, ე.ი. როგორც
 და
და  ,
,
სად არის გადაცემის კოეფიციენტი უსასრულოდ მაღალ სიხშირეზე;
არის ბოძის სიხშირე;
– ფილტრის ხარისხის კოეფიციენტი (სიხშირეზე მატების თანაფარდობა გამტარ ზოლში მომატებასთან).
ეს გადასვლა ძალაშია, ვინაიდან სერიასთან დაკავშირებული აქტიური ფილტრების ჯამური რიგი უდრის ცალკეული ფილტრების ბრძანებების ჯამს (1 + 2 = 3).
ფილტრის მთლიანი მომატება (K0 = 19.952) განისაზღვრება ინდივიდუალური ფილტრის მიღწევების პროდუქტით (K1, K2).
გადაცემის ფუნქციის კვადრატულ ფაქტორებად გაფართოებით, მივიღებთ:

ამ გამოთქმაში
![]() . (2.5.1)
. (2.5.1)
ადვილი მისახვედრია, რომ პოლუსების სიხშირეები და გადაცემის ფუნქციების ხარისხის ფაქტორები განსხვავებულია.
პირველი გადაცემის ფუნქციისთვის:
ბოძების სიხშირე;
HPF-I-ის ხარისხის ფაქტორი მუდმივია და ტოლია .
მეორე გადაცემის ფუნქციისთვის:
ბოძების სიხშირე;
ხარისხის ფაქტორი.
იმისათვის, რომ თითოეულ ეტაპზე ოპერაციულ გამაძლიერებლებს ჰქონდეთ დაახლოებით თანაბარი მოთხოვნები სიხშირის თვისებებზე, მიზანშეწონილია გადანაწილდეს მთლიანი ფილტრის მთლიანი გადაცემის კოეფიციენტი თითოეულ საფეხურს შორის შესაბამისი საფეხურის ხარისხის ფაქტორის უკუპროპორციით და აირჩიეთ დამახასიათებელი სიხშირე (op-amp-ის ერთეულის მომატების სიხშირე) ყველა საფეხურს შორის.
ვინაიდან ამ შემთხვევაში HPF შედგება ორი ეტაპისგან, ზემოაღნიშნული პირობა შეიძლება დაიწეროს როგორც:
![]()
 . (2.5.2)
. (2.5.2)
გამონათქვამის (2.5.2) ჩანაცვლებით (2.5.1) მივიღებთ:
![]() ;
;
შევამოწმოთ გადაცემის კოეფიციენტების გაანგარიშების სისწორე. ფილტრის ჯამური მომატება დროში განისაზღვრება ცალკეული ფილტრების კოეფიციენტების ნამრავლით. მოდით გადავთარგმნოთ izdB კოეფიციენტი ჯერად:
იმათ. გათვლები სწორია.
მოდით დავწეროთ გადაცემის მახასიათებელი ზემოთ გამოთვლილი მნიშვნელობების გათვალისწინებით ():
 .
.
3.7 მე-3 რიგის აქტიური HPF მიკროსქემის არჩევა
ვინაიდან, ამოცანის მიხედვით, აუცილებელია ელემენტების გადახრის მიმართ მცირე მგრძნობელობის უზრუნველყოფა, ჩვენ ვირჩევთ HPF-I-ის პირველ საფეხურს არაინვერსიული გამაძლიერებლის საფუძველზე (ნახ. 1.2, ბ) და მეორე - HPF-II დაფუძნებული წინაღობის კონვერტორებზე (CPS), რომლის წრე ნაჩვენებია ნახ. 1.5, ბ.
არაინვერსიულ გამაძლიერებელზე დაფუძნებული HPF-I-სთვის, ფილტრის პარამეტრების დამოკიდებულება მიკროსქემის ელემენტების რეიტინგებზე შემდეგია:
CPS-ზე დაფუძნებული HPF-II-ისთვის, ფილტრის პარამეტრები დამოკიდებულია ელემენტის რეიტინგებზე შემდეგნაირად:
![]() ; (3.4)
; (3.4)
![]() ;
;
4. მიკროსქემის ელემენტების გაანგარიშება
პირველი ეტაპის (HPF I) გაანგარიშება პარამეტრებით
მოდით ავირჩიოთ R1 შეყვანის წინააღმდეგობის მნიშვნელობის მოთხოვნების საფუძველზე (): R1 = 200 kOhm. შემდეგ (3.2)-დან გამომდინარეობს, რომ
![]() .
.
ჩვენ ვირჩევთ R2 = 10 kOhm, შემდეგ (3.1)-დან გამომდინარეობს, რომ
· მეორე კასკადის (HPF II) გაანგარიშება პარამეტრებით
 . .
. .
მერე ![]() (მრიცხველში კოეფიციენტი არჩეულია ისე, რომ მივიღოთ ნომინალური სიმძლავრე სტანდარტული სერიიდან E24). ასე რომ, C2 = 4.3 nF.
(მრიცხველში კოეფიციენტი არჩეულია ისე, რომ მივიღოთ ნომინალური სიმძლავრე სტანდარტული სერიიდან E24). ასე რომ, C2 = 4.3 nF.
(3.3)-დან გამომდინარეობს, რომ
(3.1)-დან გამომდინარეობს, რომ
დაე იყოს  . ასე რომ, C1 = 36 nF.
. ასე რომ, C1 = 36 nF.
ცხრილი 4.1 - ფილტრის ელემენტების რეიტინგები
4.1 ცხრილის მონაცემებიდან შეგვიძლია დავიწყოთ ფილტრის წრედის მოდელირება.
ამას ვაკეთებთ სპეციალური პროგრამის Workbench5.0-ის დახმარებით.
სქემა და სიმულაციის შედეგები ნაჩვენებია სურათზე 4.1. და ნახ.4.2, a-b.

სურათი 4.1 - მესამე რიგის Butterworth HPF-ის სქემა.

სურათი 4.2 - ფილტრის სიხშირის პასუხი (a) და ფაზის პასუხი (ბ).
5. შემუშავებული ფილტრის დაყენებისა და რეგულირების ტექნიკა
იმისათვის, რომ რეალურმა ფილტრმა უზრუნველყოს სასურველი სიხშირის პასუხი, წინააღმდეგობები და ტევადობა უნდა შეირჩეს დიდი სიზუსტით.
ეს ძალიან ადვილია რეზისტორებისთვის, თუ ისინი მიიღება ტოლერანტობით არაუმეტეს 1%, და უფრო რთული კონდენსატორის სიმძლავრეებისთვის, რადგან მათ აქვთ ტოლერანტობა 5-20% -ის ფარგლებში. ამის გამო, ჯერ გამოითვლება ტევადობა, შემდეგ კი რეზისტორების წინააღმდეგობის გაანგარიშება.
5.1 კონდენსატორების ტიპის შერჩევა
ჩვენ ვირჩევთ კონდენსატორების დაბალი სიხშირის ტიპს მათი დაბალი ღირებულების გამო.
მოითხოვს კონდენსატორების მცირე ზომებს და მასას
· აუცილებელია კონდენსატორების არჩევა რაც შეიძლება ნაკლები დანაკარგებით (დიელექტრიკის დაკარგვის მცირე ტანგენტით).
K10-17 ჯგუფის ზოგიერთი პარამეტრი (აღებულია):
ზომები, მმ
წონა, გ0,5…2
სიმძლავრის დასაშვები გადახრა, %
დაკარგვის ტანგენსი0.0015
საიზოლაციო წინააღმდეგობა, MOm1000
ოპერაციული ტემპერატურის დიაპაზონი, – 60…+125
5.2 რეზისტორების ტიპის არჩევა
· დაპროექტებული ფილტრის წრედისთვის დაბალი ტემპერატურით დამოკიდებულების უზრუნველსაყოფად აუცილებელია მინიმალური TCR-ის მქონე რეზისტორების არჩევა.
· შერჩეულ რეზისტორებს უნდა ჰქონდეთ მინიმალური შინაგანი ტევადობა და ინდუქციურობა, ამიტომ ჩვენ ავირჩევთ რეზისტორების არასადენიანი ტიპის.
· თუმცა, უსადენო რეზისტორებს აქვთ დენის ხმაურის უფრო მაღალი დონე, ამიტომ მხედველობაში უნდა იქნას მიღებული რეზისტორების თვითხმურის დონის პარამეტრიც.
C2-29V ტიპის ზუსტი რეზისტორები აკმაყოფილებს მითითებულ მოთხოვნებს (პარამეტრები აღებულია):
ნომინალური სიმძლავრე, W 0,125;
ნომინალური წინააღმდეგობის დიაპაზონი, Ohm;
TCS (ტემპერატურულ დიაპაზონში),
TCS (ტემპერატურულ დიაპაზონში ![]() ),
),
თვით ხმაურის დონე, μV/V1…5
შეზღუდეთ მოქმედი ძაბვა DC
და ალტერნატიული დენი, V200
5.3 ოპერაციული გამაძლიერებლების ტიპის შერჩევა
· ოპ გამაძლიერებლის არჩევის მთავარი კრიტერიუმი მისი სიხშირის თვისებებია, ვინაიდან რეალურ ოპ გამაძლიერებლებს აქვთ სასრული გამტარობა. იმისათვის, რომ ოპ გამაძლიერებლის სიხშირის თვისებებმა გავლენა არ მოახდინოს დაპროექტებული ფილტრის მახასიათებლებზე, აუცილებელია, რომ ოპ გამაძლიერებლის ერთიანობის მომატების სიხშირისთვის i-ე საფეხურზე შესრულდეს მიმართება:
პირველი კასკადისთვის: .
მეორე კასკადისთვის: .
უფრო დიდი მნიშვნელობის არჩევისას მივიღებთ, რომ ოპ გამაძლიერებლის ერთიანობის მომატების სიხშირე არ უნდა იყოს 100 kHz-ზე ნაკლები.
op-amp-ის მომატება საკმარისად დიდი უნდა იყოს.
· ოპტიმალური გამაძლიერებლის მიწოდების ძაბვა უნდა ემთხვეოდეს კვების წყაროების ძაბვას, თუ ცნობილია. წინააღმდეგ შემთხვევაში, სასურველია აირჩიოს op-amp, მიწოდების ძაბვის ფართო სპექტრით.
· მრავალსაფეხურიანი მაღალგამტარი ფილტრისთვის op-amp-ის არჩევისას უმჯობესია აირჩიოთ op-amp ყველაზე დაბალი შესაძლო მიკერძოებული ძაბვით.
საცნობარო წიგნის მიხედვით, ჩვენ ავირჩევთ 140UD6A ტიპის OS-ს, სტრუქტურულად შექმნილი 301.8-2 ტიპის შემთხვევაში. ამ ტიპის ოპ-ამპერები არის ზოგადი დანიშნულების ოპ-ამპერები შიდა სიხშირის კორექტირებით და გამომავალი დაცვით დატვირთვის მოკლე ჩართვის შემთხვევაში და აქვთ შემდეგი პარამეტრები:
მიწოდების ძაბვა, ვ
მიწოდების ძაბვა, ვ
მოხმარების დენი, mA
მიკერძოების ძაბვა, mV
Op-amp ძაბვის მომატება
ერთიანობის მომატების სიხშირე, MHz1
5.4 შემუშავებული ფილტრის დაყენებისა და რეგულირების ტექნიკა
ამ ფილტრის დაყენება არც ისე რთულია. სიხშირეზე პასუხის პარამეტრების „რეგულირება“ ხდება რეზისტორების, როგორც პირველი, ისე მეორე ეტაპის, ერთმანეთისგან დამოუკიდებლად, და ერთი ფილტრის პარამეტრის დაყენება გავლენას არ ახდენს სხვა პარამეტრების მნიშვნელობებზე.
დაყენება ხორციელდება შემდეგნაირად:
1. მომატება დგინდება პირველი საფეხურის R2 და მეორე საფეხურის R5 რეზისტორებით.
2. პირველი საფეხურის ბოძის სიხშირეს ადგენს რეზისტორი R1, მეორე საფეხურის ბოძის სიხშირეს ადგენს რეზისტორი R4.
3. მეორე საფეხურის ხარისხის კოეფიციენტი რეგულირდება R8 რეზისტორით, ხოლო პირველი ეტაპის ხარისხის კოეფიციენტი არ არის რეგულირებული (ის მუდმივია ელემენტების ნებისმიერი რეიტინგისთვის).
ამ კურსის მუშაობის შედეგია მოცემული ფილტრის სქემის მიღება და გამოთვლა. HPF სიხშირის მახასიათებლების დაახლოებით ბატერვორტის პოლინომილით მითითების ტერმინებში მოცემულ პარამეტრებთან, აქვს მესამე რიგის და არის პირველი რიგის ორსაფეხურიანი დაკავშირებული HPF (არაინვერსიული გამაძლიერებლის საფუძველზე) და მეორე რიგის (წინაწინაღმდეგობის გადამყვანებზე დაყრდნობით). წრე შეიცავს სამ ოპერაციულ გამაძლიერებელს, რვა რეზისტორს და სამ ტევადობას. ეს წრე იყენებს ორ დენის წყაროს თითო 15 ვ.
საერთო ფილტრის თითოეული ეტაპისთვის მიკროსქემის არჩევა განხორციელდა ტექნიკური დავალების საფუძველზე (ელემენტების მნიშვნელობებში გადახრებისადმი დაბალი მგრძნობელობის უზრუნველსაყოფად), თითოეული ტიპის ფილტრის უპირატესობებისა და უარყოფითი მხარეების გათვალისწინებით. სქემები, რომლებიც გამოიყენება საერთო ფილტრის ეტაპად.
მიკროსქემის ელემენტების რეიტინგები შეირჩა და გამოითვალა ისე, რომ ისინი მაქსიმალურად მიუახლოვდეს სტანდარტულ ნომინალურ სერიას E24 და ასევე მიიღონ ფილტრის თითოეული ეტაპის ყველაზე დიდი შესაძლო შეყვანის წინაღობა.
ფილტრის მიკროსქემის მოდელირების შემდეგ ElectronicsWorkbench5.0 პაკეტის გამოყენებით (ნახ. 5.1), მიღებული იქნა სიხშირის პასუხები (ნახ. 5.2) საჭირო პარამეტრებით, რომლებიც მოცემულია მითითებაში (ნახ. 2.2).
ამ სქემის უპირატესობებში შედის ფილტრის ყველა პარამეტრის დაყენების სიმარტივე, თითოეული ეტაპის ცალკე დაყენება და დაბალი მგრძნობელობა ელემენტების რეიტინგებიდან გადახრების მიმართ.
ნაკლოვანებები არის სამი ოპერაციული გამაძლიერებლის გამოყენება ფილტრის წრეში და, შესაბამისად, მისი გაზრდილი ღირებულება, ისევე როგორც შედარებით დაბალი შეყვანის წინაღობა (დაახლოებით 50 kOhm).
გამოყენებული ლიტერატურის სია
1. Zelenin A.N., Kostromitsky A.I., Bondar D.V. - აქტიური ფილტრები საოპერაციო გამაძლიერებლებზე. - ხ .: ტელეტეხი, 2001 წ. მეორე, სწორი. და დამატებითი - 150 გვ.: ავად.
2. რეზისტორები, კონდენსატორები, ტრანსფორმატორები, ჩოკები, REA გადართვის მოწყობილობები: Ref./N.N. აკიმოვი, ე.პ. ვაშჩუკოვი, ვ.ა. პროხორენკო, იუ.პ. ხოდორენოკი. - მინსკი: ბელორუსია, 2004. - 591 გვ.: ილ.
ანალოგური ინტეგრირებული სქემები: Ref./A.L. ბულიჩევი, ვ.ი. გალკინი, 382 გვ.: V.A. პროხორენკო. - მე-2 გამოცემა, შესწორებული. და დამატებითი - მინსკი: ბელორუსია, 1993. - ჯოჯოხეთი.