Але можна побудувати лічильник всього на одній мікросхемі - універсальному програмованому мікроконтролері, що має у своєму складі різноманітні периферійні пристрої та здатний вирішувати дуже широке коло завдань. Багато мікроконтролерів мають особливу область пам'яті - EEPROM. Записані в ній (у тому числі під час виконання програми) дані, наприклад, поточний результат рахунку, зберігаються і після вимкнення живлення.
У лічильнику застосований мікроконтролер Attiny2313 з сімейства AVR фірми Almel. У приладі реалізований реверсивний рахунок, виведення результату з гасінням незначних н
вулик на чотирирозрядний світлодіодний індикатор, збереження результату в EEPROM при вимкненому живленні. Вбудований в мікроконтролер аналоговий компаратор використано для своєчасного виявлення зменшення напруги живлення. Лічильник запам'ятовує результат рахунку при відключенні живлення, відновлюючи його при включенні, і аналогічно механічному лічильнику має кнопку обнулення показань.
Схема лічильника представлена малюнку. Шість ліній порту (РВ2-РВ7) і п'ять ліній порту D (PDO, PD1, PD4-PD6) використані для організації динамічної індикації результату рахунку на світлодіодний індикатор HL1. Колекторними навантаженнями фототранзисторів VT1 і VT2 служать вбудовані мікроконтролер і включені програмно резистори, що з'єднують відповідні висновки мікроконтролера з ланцюгом його живлення.
Збільшення результату рахунку N на одиницю відбувається в момент переривання оптичного зв'язку між діодом випромінюючим VD1 і фототранзистором VT1, що створює наростаючий перепад рівня на вході INT0 мікроконтролера. При цьому рівень на вході INT1 повинен бути низьким, тобто фототранзистор VT2 повинен бути освітлений діодом випромінюючим VD2. У момент наростаючого перепаду на вході INT1 за низького рівня на вході INT0 результат зменшиться на одиницю. Інші комбінації рівнів та їх перепадів на входах INT0 та INT1 результат рахунку не змінюють.
Після досягнення максимального значення 9999 рахунок продовжується з нуля. Віднімання одиниці з нульового значення дає результат 9999. Якщо зворотний рахунок не потрібен, можна виключити з лічильника випромінюючий діод VD2 і фототранзистор VT2 і з'єднати вхід мікроконтролера INT1 із загальним проводом. Рахунок йтиме лише на збільшення.
Як уже сказано, детектором зниження напруги живлення служить вбудований в мікроконтролер аналоговий компаратор. Він порівнює нестабілізовану напругу на виході випрямляча (діодного мосту VD3) із стабілізованим на виході інтегрального стабілізатора DA1. Програма циклічно перевіряє стан компаратора. Після відключення лічильника від мережі напруга на конденсаторі фільтра випрямляча С1 спадає, а стабілізований деякий час залишається незмінним. Резистори R2-R4 підібрані так. що стан компаратора у цій ситуації змінюється протилежне. Виявивши це, програма встигає записати поточний результат рахунку в EEPROM мікроконтролера ще до припинення його функціонування через вимкнення живлення. При наступному включенні програма прочитає число, записане в ЕЕРРОМ, та виведе його на індикатор. Рахунок буде продовжено з цього значення.
Зважаючи на обмежену кількість висновків мікроконтролера для підключення кнопки SB1, що обнулює лічильник, використаний висновок 13, що служить аналоговим інвертуючим входом компаратора (AIM) і одночасно - "цифровим" входом РВ1. Дільником напруги (резистори R4, R5) тут заданий рівень, що сприймається мікроконтролером як високий логічний. При натисканні на кнопку SB1 він стане низьким. На стан компаратора це не вплине, тому що напруга на вході AIN0, як і раніше, більша, ніж на AIN1.
При натиснутій кнопці SB1 програма виводить у всіх розрядах індикатора знак мінус, а після її відпускання починає рахунок з нуля. Якщо при натиснутій кнопці вимкнути живлення лічильника, поточний результат не буде записаний в EEPROM, а значення, що зберігається там, залишиться колишнім.
Програма побудована таким чином, що її легко адаптувати до лічильника з іншими індикаторами (наприклад, із загальними катодами), з іншим розведенням друкованої платиі т. п. Невелика корекція програми буде потрібна і при використанні кварцового резонатора на частоту, що відрізняється більш ніж на 1 МГц від зазначеної.
При напрузі джерела 15 вимірюють напругу на контактах 12 і 13 панелі мікроконтролера щодо загального дроту (конт.10). Перше має перебувати в інтервалі 4...4.5, а друге - бути більше 3,5, але менше першого. Далі поступово зменшують напругу джерела. Коли воно впаде до 9... 10, різниця значень напруги на контактах 12 і 13 повинна стати нульовою, а потім поміняти знак.
Тепер можна встановити панель запрограмований мікроконтролер, підключити трансформатор і подати на нього мережну напругу. Через 1,5...2 с потрібно натиснути кнопку SB1. На індикатор лічильника буде виведена цифра 0. Якщо на індикатор нічого не виведено, перевірте ще раз значення напруги на входах AIN0.AIN1 мікроконтролера. Перше має бути більше за друге.


Коли лічильник успішно запущено, залишається перевірити правильність рахунку, по черзі затінюючи фототранзистори непрозорою для ІЧ променів пластиною. Для більшої контрастностііндикатори бажано закрити світлофільтром із червоного органічного скла.

Ще якщо хтось буде збирати лічильник на Atiny2313 без кварцу,
Фьюзи я запрограмував так
вихідний ASM
Прошивка
У радіоаматорській практиці часто виникає необхідність намотати/перемотати різні обмотки трансформаторів, дроселів, реле та ін.
При розробці даного верстата ставилися такі завдання:
1. Малі габарити.
2. Плавний старт шпинделя.
3. Лічильник до 10000 витків (9999).
4. Намотування з автоматичним укладанням дроту. Крок укладання (діаметр дроту) 0.02 – 0.4мм.
5. Можливість намотування секційних обмоток без переналаштування.
6. Можливість закріплення та намотування каркасів без центрального отвору.

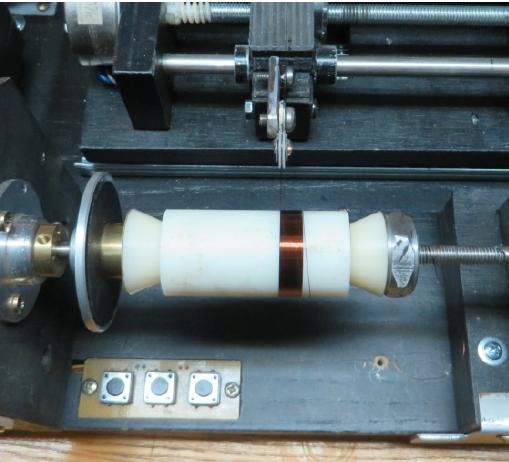
Малюнок 1.
Зовнішній вигляд намотувального верстата.
Склад намотувального верстата.
1. Бобіна, що подає (котушка з проводом).
2. Пригальмовування (гальмівний механізм).
3. Кроковий двигун центрування бобіни.
4. Кулькові меблеві напрямні.
5. Шторка оптичних датчиків механізму центрування бобіни.
6. Ручка переміщення позиціонера в іншу секцію при намотуванні секційних обмоток.
7. Кнопки ручного перемикання напряму укладання.
8. Світлодіоди напряму укладання.
9. Кроковий двигун позиціонера.
10. Шторки оптичних датчиків межі намотування.
11. Гвинт позиціонера.
12. Кулькові меблеві напрямні.
13. котушка, що намотується.
14. Двигун намотування.
15. Лічильник витків.
16. Кнопки налаштування.
17. Оптичний датчик синхронізації.
18. Регулятор швидкості.
Пристрій та принцип дії.
Вузол, що подає.
Вузол, що подає, призначений для закріплення на ньому бобіни з проводом, різних величин, і забезпечення натягу проводу.
У нього входить механізм кріплення бобін та механізм підгальмовування валу.

Малюнок 2.
Вузол, що подає.
Підгальмовування.
Без підгальмовування бобіни, що подає, намотування проводу на каркасах буде пухка і якісної намотування не вийде. Повстяна стрічка «2», гальмує барабан «1». Поворот важеля "3", натягує пружину "4" - регулювання сили гальмування. Для різної товщини дроту налаштовується своє пригальмовування. Тут використовують готові деталі відеомагнітофона.

Малюнок 3.
Підгальмовуючий механізм.
Центрівка бобіни.
Малі габарити верстата і розташування в безпосередній близькості, котушки, що намотується, і подає бобіни з проводом, зажадали ввести додатковий механізм центрування подавальної бобіни.


Малюнок 4, 5.
Центрувальний механізм.
При намотуванні котушки, провід з бобіни впливає на шторку «5», виконану у вигляді “вилки” та кроковий двигун"3", через редуктор з розподілом 6 і зубчастий ремінь, по роликових напрямних "4", автоматично зсуває бобіну в потрібному напрямку.
Таким чином, провід завжди знаходиться по центру див. рис 4, рис 5:

Малюнок 6.
Датчики, заднього виду.
Склад та пристрій датчиків.
19. Оптичні датчики механізму центрування бобіни.
5. Шторка, що перекриває датчики механізму центрування бобіни.
20. Шторки, що перекривають датчики перемикання напрямку позиціонера.
21. Оптичні датчики перемикання напряму позиціонера.
Позиціонер.
Шторками "20" рис. 6 - виставляється межа намотування. Кроковий двигун переміщує механізм укладача, поки шторка не перекриє один із датчиків «21» рис. 6, після чого змінюється напрямок укладання.
У будь-який момент можна змінити напрямок укладання кнопками «1» рис. 7.

Малюнок 7.
Укладальник.
Швидкість обертання крокового двигуна 9 рис. 7, синхронізована за допомогою датчика «10», «11» рис 8, з обертанням котушки, що намотується, і залежить від діаметра проводу встановленого в меню. Діаметр дроту може бути виставлений 0.02 - 0.4мм. За допомогою ручки "8" рис. 7, можна пересунути весь позиціонер убік, не змінюючи межі намотування. Таким чином, можна намотати іншу секцію у багатосекційних каркасах.

Малюнок 8.
Оптодатчик.
Склад позиціонера та оптодатника (рис. 7-8).
1. Кнопки ручного перемикання напряму укладання.
2. Світлодіоди напряму укладання.
3. Шторки, що перекривають датчики перемикання напрямку позиціонера.
4. Лінійний підшипник.
5. Капролонова гайка.
6. Провідний гвинт. Діаметр 8мм, крок різьблення 1,25мм.
7. Кулькові меблеві напрямні.
8. Ручка переміщення позиціонера в іншу секцію при намотуванні секційних обмоток.
9. Кроковий двигун.
10. Оптичний датчик синхронізації.
11. Диск, який перекриває датчик синхронізації. 18 прорізів.
Приймальний вузол.

Малюнок 9.
Приймальний вузол.


Малюнок 10, 11.
Приймальний вузол.
1. Лічильник витків.
2. Колекторний високошвидкісний двигун.
3. Шестерня редуктора.
4. Кнопка "скидання лічильника".
5. Регулювання швидкості.
6. Вмикач «Старт намотування».
7. Кріплення котушки, що намотується.
Обертання котушки, що намотується, виробляє колекторний високооборотний двигун через редуктор.
Редуктор складається з трьох шестерень із загальним розподілом 18. Це забезпечує необхідний крутний момент на малих оборотах.
Регулювання швидкості двигуна, проводиться зміною напруги живлення.

Малюнок 12, 13.
Кріплення каркаса, що має отвір.
Конструкція приймального вузла дозволяє закріплювати як каркаси, що мають центральний отвір, так і каркаси, таких отворів не мають, що добре видно на малюнках.


Малюнок 14, 15.
Кріплення каркаса, що не має отвір.
Електрична схема.

Малюнок 16.
Електрична схема намотувального верстата.
Усіми процесами верстата керує мікроконтролер PIC16F877.
Індикація кількості витків та діаметра дроту відображається на світлодіодному чотирьох знаковому індикаторі. При натиснутій кнопці «D», відображається діаметр дроту, при відтиснутій кількість витків.
Для зміни діаметра дроту, натиснути кнопку «D» та кнопками «+», «-» змінити значення. Встановлене значення автоматично зберігається в EEPROM. Кнопка "Zerro" - обнулення лічильника. Роз'єм "ISCP" служить для програмування мікроконтролера.
P.S. Креслень механічної частини не існує, тому що пристрій виготовлявся в одному примірнику, і конструкція формувалася в процесі збирання.
У цій конструкції були використані наявні в розбиранні елементи та вузли (що не мають маркування) від відеомагнітофонів та принтерів.
У жодному разі я не наполягаю у точному повторенні даної конструкції, а лише як у використанні будь-яких вузлів від неї у своїх конструкціях.
Повторення даного пристроюможливо досвідченими радіоаматорами, що мають навички роботи з механікою і здатними змінити конструкцію під свої механічні частини.
Механічна частина відповідно, то, можливо реалізована інакше.
Редуктори на двигунах можуть бути і з іншим розподілом.
Критичні елементи:
Щоб програма працювала правильно, необхідно дотриматись низки умов, а саме;
Оптичний датчик «17» рис 1. може бути іншої конструкції, але обов'язково на 18 отворів.
Гвинт позиціонера, обов'язково з кроком 1,25 мм - це стандартний крок для гвинта діаметром 8 мм.
Кроковий двигун позиціонера 48 кроків/оборот, 7.5 градусів/крок - це найпоширеніші двигуни в оргтехніці.
Демонстраційний ролик роботи верстата:
Нижче в прикріпленні (в архіві) зібрані всі необхідні файли та матеріали для складання намотувального верстата.
Якщо по збиранню та налагодженню у когось виникнуть якісь питання, то ставте їх на форумі. По можливості постараюся відповісти та допомогти.
Бажаю всім удачі у творчості та всього найкращого!
Архів "Намотковий верстат"."
І не про що не думав, поки не потрапив мені на очі якийсь нехитрий лічильний пристрій. Те, що воно має бути пристосовано для підрахунку кількості витків проводу, що намотуються, на котушки трансформаторів - сумніву не підлягало, бо немає насолоди вище, ніж роблячи одне, думати про інше. А хіба перебуваючи в стані повного зосередження (подібно трансу) і при цьому бубна відлік витків, це можливо? А пристосувати не складно. Так само як і знайти таку ж штукенцію або їй подібну. Різних лічильників зараз безліч, а підійде навіть несправний. Тим більше, що на початку його потрібно акуратно, запам'ятовуючи взаємне розташування деталей (а краще все це сфотографувати) розпорошити і викинути все зайве.
Отже, з внутрішнього вмісту залишаємо цифрові колеса, зубчасті шестерні, осі для їх посадки та стійки-тримачі осей, які збираємо «за місцем» (так, як вони й стояли до розбирання). Осі у ліву стійку бажано вклеїти. На цифрових колесах, поруч із центральним отворомє ще одне - складальне, їм колесо надівається на шпильку (рівну і пружну тяганину, яка забирається перед встановленням ковпака). Без цієї помічниці нічого не вийде. При цьому перед кріпленням другої стійки не забуваємо надіти на провідне колесо гумовий пасик (краще плоский) відповідної довжини.

У донній частині та в ковпаку, по центру, робимо наскрізні отвори (наприклад діаметром 3мм) для подальшого скріплення гвинтом з гайкою. Це обов'язково, бо в процесі експлуатації будуть струси конструкції, при яких все нами зібране буде постійно розвалюватися (перевірено). Також у ковпаку робиться пропив шириною трохи менше (щоб не злітав пасик) провідного цифрового колеса та довжиною через весь ковпак. Не зайвими будуть ще одне - два отвори в бічній стінці ковпака, вони стануть у пригоді при його встановленні на місце, бо при цьому потрібно потрапити верхніми шліцами на стійках у відповідні пази (до речі, лівий і правий різні розміром– не плутати) усередині ковпака. Ось через них викруткою і спрямовувати. У донній частині потрібно передбачити пару отворів для кріплення гвинтами або шурупами всієї вже зібраної конструкції до намотувального пристрою.

Як і де кріпити, зібраний лічильник до намотувального пристрою - повна свобода творчості. А ось їхнє робоче з'єднання - ось таке:

На провідний вал намотувального пристрою встановлюється шків (це в ідеалі) або втулка з м'якої пластмаси з внутрішнім діаметром трохи менше 6 мм (щоб одягалися внатяг) і зовнішнім діаметром при якому один поворот ведучого валу буде відповідати одному повороту лічильника провідного цифрового колеса. Найпростіший варіант - на відповідну поліхлорвінілову або товсту пластмасову трубку довжиною 10 мм намотується достатньою товщиною (ну скажімо до діаметра 20 мм) вузький скотч (можна ізоленту, але гірше) і починаємо налаштування, при необхідності відмотуючи або підмотуючи скотч до оптимальної товщини.

Коротше, домагаємось співвідношення передавального числа Один до одного. Особливо не затятий, вдалося зробити похибку в +1 виток на 150 оборотів валу намотувального пристрою. Ну, а відома похибка повністю виключає незадовільний результат роботи. Тепер під час роботи можна мріяти, співати пісні та, за необхідності, гідно відбивати нападки інших членів сім'ї. З побажанням успіху, Babay.
Обговорити статтю ЛІЧИЛЬНИК ВІТКІВ
Сталося так, що припекло мені трансформатор мотати, все б добре, та верстата тільки не вистачає – від тут і почалося! Пошук по інтернетам дав деякі можливі варіантиверстато-побудови, але бентежило мене те, що підрахунок витків проводиться знову ж таки механічним лічильником, здобутим зі спідометра або старого магнітофона, а також геркони з калькуляторами. Хм …. На механіку, у плані лічильника, у мене не стояло абсолютно, спідометрів на розбирання у мене немає, зайвих калькуляторів теж. Та й як сказав тов. Seregaз РадіоКота: « Хороші електронники, найчастіше - погані механіки!». Може я і не найкращий електронник - але механік точно паршивий.
Тому вирішив я сварганити електронний лічильник, а всю механічну частину пристрою доручити на розробку сімейству (благо батько і брат у мене саме аси в частині механіки).
Прикинувши одне місце до іншого, вирішив, що 4 розрядів індикаторів мені вистачить з головою - це не багато - не мало, а 10 000 витків. Управляти всім неподобством буде контролер, ось тільки улюблені ATtiny2313 і ATmega8 мені здалося зовсім не комільфо пхати в такий пльовий пристрій, завдання просте і вирішувати її потрібно просто. Тому будемо користувати ATtiny13 - напевно, найдохліший МК з тих, що є у продажу на сьогоднішній момент (я не беру PIC-і або MCS-51 - ці я тільки запрограмувати зможу, а ось програми для них писати не вмію). Ніг у цієї тиньки замало, ну ніхто не заважає нам зсувні регістри до неї прикрутити! Як датчик оборотів вирішив використовувати датчик холу.
Накидав схему:
Про кнопки відразу не сказав - а куди ж без них! Цілих 4 штуки крім ресета (S1).
S2 - включає режим намотування (режим встановлено за замовчуванням) - з кожним оборотом осі з котушкою буде збільшувати значення витків на 1
S3 - режим змотування, відповідно, з кожним оборотом, буде зменшувати значення на 1. Максимально змотати можна до «0» - мінус змотуватися не буде:)
S4 - читання збереженої в EEPROM інформації.
S5 - запис EEPROM поточного значення + режим.
Природно потрібно не забувати натиснути на кнопку смотування, якщо збираємося змотувати витки, інакше вони приплюсовуватимуться. Можна було повісити замість 1 датчика холу - 3 штуки або валкодер і змінити програму контролера таким чином, щоб він сам вибирав напрямок обертання, але думаю в даному випадку це зайве.
Тепер не багато за схемою:
Як бачимо, нічого надприродного у ній немає. Живиться все це неподобство від 5В., Струм споживає щось в районі 85мА.
З датчика холу TLE4905L (можна спробувати і інший встромити, я вибирав за принципом «що дешевше і є в наявності») сигнал надходить на контролер, генерується переривання та змінюється поточне значення, залежно від вибраного режиму. Контролер відсилає інформацію на зсувні регістри, з яких вона, своєю чергою, вирушає на семисегментні індикатори чи клавіатуру. Семисегментники застосовував із загальним катодом, у мене був одразу квартет в одному корпусі, але бажаючим ніхто не заважає прикрутити 2 здвоєні або 4 одиночні з'єднавши паралельно аноди. Крапка на індикаторах не використовується, відповідно висновок H (dp) висить у повітрі. Працюють індикатори в динамічному режимі, тому опори R3-R9 номіналом менше розрахункових. На транзисторах VT1-VT4 зібрано драйвери для індикаторів. Можна було застосувати і спеціалізовані мікросхеми типу ULN2803, але вирішив на транзисторах, з тієї простої причини, що у мене їх скупчилося - як бруду, деяким з них років більше ніж мені.
Кнопки S2-S4 – а-ля матрична клавіатура. "Виходи" кнопок висять на тих же провідниках як і входи регістрів, справа в тому, що після пересилання даних з контролера в регістри на входах SHcp і Ds може бути сигнал будь-якого рівня, і на вміст регістрів це ніяк не вплине. «Входи» кнопок висять на виходах регістрів, передача інформації відбувається приблизно так: спочатку контролер відправляє інформацію на регістри для подальшого пересилання на індикатори, потім відправляє інформацію для сканування кнопок. Резистори R14-R15 необхідні для запобігання бійкам між ногами регістрів/контролера. Пересилання інформації на індикацію і на сканування клави відбувається на великій частоті (внутрішній генератор в тині13 налаштований на 9,6 МГц), відповідно як швидко ми не намагалися б натиснути і відпустити кнопку, за час натискання відбудеться багато спрацьовувань і відповідно нулик з кнопки побіжить на зустріч одиниці з контролера. Ну і така неприємна річ як брязкіт контактів кнопок знову ж таки.
Резисторами R16-R17 підтягуємо нашу клавіатуру до живлення, щоб під час простою з виходів клавіатури на входи контролера приходила одиниця, а не Z стан, що тягне помилкові спрацьовування. Можна було обійтися і без цих резисторів, внутрішніх pull-up резисторів у МК цілком достатньо, ну та рука у мене не піднялася їх прибрати – береженого бог береже.
За схемою начебто й усе, для тих, хто зацікавився, наводжу список компонентів. Відразу зазначу, що номінали можуть відрізнятися в той чи інший бік.
IC1 - мікроконтролер ATtiny13, можна застосувати з літерою V. Розпинування для варіанта в SOIC-і така ж як на схемі. Якщо у когось виникне бажання застосувати в корпусі QFN/MLF - тому даташит до рук.
IC2-IC3 - 8-ми розрядні зсувні регістри з клямкою на виході - 74HC595, на макеті я використовував у корпусах DIP на платі в готовому пристрої в SOIC-і. Розпинування однакове.
IC4 – цифровий однополярний датчик холу TLE4905L. Обв'язка по датасіту R2 - 1k2, C2-C3 по 4n7. При встановленні датчика на верстат перевірити, на який бік магніту він реагує.
C1, C4 і C5 - конденсатори фільтруючі живлення, я ставив по 100n, повинні бути встановлені, якомога ближче до живильних висновків мікросхем.
R1 – резистором підтягуємо ногу ресет до харчування, 300Ом – і далі. Я встановлював 1k.
R3-R9 - струмообмежувальні резистори для індикаторів. 33 Ом - 100 Ом, чим більше опір, тим відповідно тьмяніше світитимуть.
R10-R13 - обмежують струм у ланцюгах баз транзисторів. На макеті стояли по 510 Ом, у плату вкрутив по 430 Ом.
VT1-VT4 - КТ315 з будь-якими буквеними індексами, можна замінити на КТ3102, КТ503 та аналоги.
R14-R15 як писалося вище для запобігання "бійки", думаю можна поставити від 1k і вище, але не задирати вище 4k7. При R16-R17 рівних 300 Ом, сумарний опірпослідовно з'єднаних резисторів не повинно перевищувати 5k, в ході моїх експериментів з підвищенням опору вище 5k з'являлися помилкові спрацьовування кнопок.
Після перевірки роботи лічильника на макеті, настав час зібрати залізницю в «закінчений пристрій».
Плату розводив у SL, причому розвів швидше за все не оптимально - підганяв під наявні деталі, ліньки мені було на ринок їхати купувати інші. Загалом розвів, надрукував на прозорій односторонній плівці Lomond для чорно-білих лазерних принтерів. Друкував у негативі, у 2-х примірниках. Негатив - бо збирався ПП робити за допомогою плівкового фоторезиста, а він у свою чергу NEGATIVE. А в 2-х примірниках - щоб при поєднанні вийшов максимально непрозорий шар тонера. Немає в мене бажання ще й балон із аерозолем TRANSPARENT 21
купувати.
Поєднуємо фотошаблони, виставляючи "на просвіт", щоб ідеально поєдналися отвори закріплюємо звичайним степлером - до цієї процедури потрібно підійти відповідально, від неї багато в чому залежить якість майбутньої плати.
Тепер треба підготувати фольгований текстоліт. Хтось трет його дрібною шкіркою, хтось гумкою, а я, останнім часом, віддаю перевагу наступним варіантам:
1. Якщо мідь не дуже засрата окислами, досить її протерти тампоном змоченим у нашатирному спирті - ох і смердюча херня доповім я Вам, не подобається мені це заняття, але зате спритно. Ідеально мідь блищати після цього не буде, але оксид спирт змиє і плата протруїться.
2. Якщо мідь загажена порядно, я її полірую повстяним колом. Вішаю його на дриль та вуаля. Особливо тут старатися не треба, пасту ГОІ я не застосовую, для подальшого протравлення достатньо тільки повстяного кола. Швидко та ефективно.
Загалом підготували - фото викласти не можу, блищить зараза як дзеркало і нічого не видно на фотці, фотограф з мене паршивий.
Ну та гаразд, далі будемо накочувати фоторезист.
Треба визнати, що фоторезист у мене вже вийшов і термін придатності і до плати собака липнути відмовляється, тому доводиться попередньо гріти плату. Я грію феном, але можна і праскою. Добре було б звичайно для цих цілей ламінатор мати, але:
- бабла мені на нього тепер шкода
- коли бабла було не шкода було тупо ліньки:)
На гарячу плату накочуємо фоторезист, не забувши зняти захисну плівку. Намагаємося це робити максимально акуратно, щоб між платою та фоторезистом не було повітряних бульбашок. Боротися з ними потім – окрема дупа. Якщо ж бульбашки таки з'явилися, проколюю їх голкою.
Накочувати можна за будь-якого освітлення і займатися херней згадуючи любителів-фотографів, головне у нашій справі відсутність сонячних променів та інших джерел ультрафіолету.
Після накатки, прогріваю плату гарячою праскою через газету, цим лікуються проколоті бульбашки, та й фоторезист прилипає намертво.
Далі накладаємо шаблон на плату, тут плата двостороння, тому шаблон буде по обидва боки плати. Кладемо цей бутерброд на лист оргскла і притискаємо вторим листом зверху. Два листи необхідні для того, щоб після засвічення однієї сторони, можна було акуратно перевернути плату не зсунувши фотошаблон.
Засвічуємо з іншого боку. Я користуюсь ось такою лампою:
Засвічую з відстані десь 150мм протягом 7 хвилин (відстань і час підбираються експериментально).
Далі готуємо слабкий лужний розчин – чайна ложка кальцинованої соди на півлітра води. Температура води – не важлива. Розмішуємо, щоб розчинилася вся сода. Для рук цей розчин не небезпечний, на дотик як мильна вода виходить.
Знімаємо з нашої плати захисну плівку і кидаємо в розчин, після чого активно пензликом починаємо терти - але особливо не натискаємо, щоб не здерти доріжки. Можна звісно і не терти, але тоді є варіант змиватися фоторезист буде:
- довго
- змиється все
а нам чи то не інше не підходить, тому трьом.
отримуємо щось схоже:
Промиваємо плату водою, розчин не виливаємо - він нам ще знадобиться. Якщо в процесі прояву плати якісь доріжки все-таки відшарувалися або повітряні бульбашки доріжки зіпсували, потрібно ці місця підретушувати цапонлаком або особливим маркером. Далі труїмо плату. Я користуюсь хлорним залізом.
Після травлення знову промиваємо плату водою і кидаємо назад в лужний розчин, щоб змити не потрібний фоторезист. Годинник вистачає.
Далі лудимо. Для маленьких плат або дуже ювелірних користуюся сплавом Розе, для таки плат - тупо паяльником з плоским жалом розмазую олово по платі. Плату в цьому випадку має думку покрити флюсом, я користуюся звичайним спирто-каніфольним.
Комусь може здатися що доріжки вийшли не дуже рівними - доріжки вийшли рівними:) це витрати методу лудіння паяльником, олово не рівномірно лягає.
У закінченому варіанті кнопка скидання відсутня - ну нікуди мені її було на платі встромляти, тож місця мало, а якщо зависне МК, значить знеструмлю і заново включу. Так само з'явився діод у ланцюзі живлення – захист від переполюсування. Що стосується решти деталей - то використовував лише ті, що були під рукою, тому тут і SMD, і звичайні корпуси.
На нерухомій частині верстата кріпимо датчик, на вісь обертання встановлюємо магніт таким чином, щоб він при обертанні проходив 3-5 мм від датчика. Ну і користуємось:)
Тепер точно все, дякую всім за увагу, а товаришам GP1і Avrealза допомогу у розробці.
Для всіх радіоаматорів, або ентузіастів, що захоплюються звуковідтворювальною апаратурою, намотувальний верстат є вкрай затребуваним обладнанням. Такі пристрої використовуються для намотування одношарових та багатошарових котушок циліндричного типу для трансформаторів.
У цій статті ми вивчимо пристрій та принцип роботи намотувального верстата, а також розглянемо покрокову інструкцію, за якою ви зможете зробити таке обладнання своїми руками.
1 Конструкція та принцип роботи
Намотувальний верстат незамінний при виробництві однотипних виробів. Існує два види таких агрегатів – автоматичні та ручні, при цьому останні у промисловій сфері практично не поширені через обмежену функціональність.
Однак габаритні розміри, велика вага і вартість автоматичних намотників роблять їх непридатними в побуті, тому для будинку краще придбати ручний верстат. Стандартна конструкція такого пристрою складається з наступних елементів:
- несучий каркас із двох вертикальних стійок з металу або дерева, між якими зафіксовані горизонтальні осі (на центральній стійці - для пластин з коліщатком, на зовнішній - для самої котушки);
- велика і мала шестерні, що передають на котушку момент, що крутить;
- ручка, зафіксована на великій шестірні, за допомогою якої обертається вісь із котушкою;
- кріпильні елементи - гвинти та гайки.
![]()
Принцип дії такого пристрою гранично простий - обертання ручки призводить до намотування на каркас дроту або кабелю, що обертається, за рівномірність намотування відповідає напрямна укладача, яка переміщає дріт в горизонтальній площині.
Контроль кількості витком може виконуватися як візуально, так і за допомогою спеціальних лічильників, найпростішим є звичайний велосипедний одометр. У більш просунутих верстатах як лічильник використовується спеціальний магнітно-герконовий датчик.
1.1 Магазинні верстати
Серед промислових намотувальних агрегатів повсюдною популярністю користується верстат для намотування кабелю СРН-05М3. Ця модельбула запущена в експлуатацію ще за часів СРСР, і з того часу добре себе зарекомендувала завдяки високій надійності та продуктивності. На вторинному ринку СРН-05М3 можна виявити за 15-20 тис. рублів.

СРН-05М3 виконаний у корпусі з чавуну, вага обладнання становить 80 кг, габарити — 877*840*142 см. Верстат дозволяє намотувати одношарові, двошарові та тороїдальні котушки в режимі автоматичного укладання. Мінімальний діаметр кабелю – 0.05 мм, максимальний – 0.5 мм. Агрегат комплектується однофазним електромотором типу ВУЛ-62, потужність якого становить 0.18 кВт. Найбільша швидкість обертання при намотуванні – 5100 об/хв.

Для побутової експлуатації найкращим виборомбуде ручний верстат NZ-1 (Китай). Незважаючи на країну походження NZ-1 є досить надійним та функціональним обладнанням. Агрегат призначений для намотування котушок діаметром до 150 мм з максимальною шириною не більше 100 мм. Коефіцієнт передавального відношення становить 1:08 швидкому режимінамотування та 1:0.1 у повільному. максимальна швидкість- Не більше 1000 об / хв.
NZ-1 укомплектований лічильником витків механічного типу. Корпус виконаний із металу, опорна станина — із чавуну. Верстат оснащений шківом, що дозволяє підключатися до нього електродвигун через ремінну передачу та працювати в автоматичному режимі. Вартість такого обладнання варіюється в межах 4-5 тис. рублів.
1.2 Саморобний намотувальний верстат (відео)
2 Робимо верстат для намотування своїми руками
Представлений у даному розділіСтатті верстат для намотування кабелю дозволяє працювати з котушками на квадратному, круглому і прямокутному каркасі з діагоналлю до 200 мм, його можна буде комплектувати різними шківами, що дозволить змінювати крок намотування в межах 0.3-3.2 мм.

Наведена схема показує каркас верстата. Для складання станини використовуються металеві листи товщиною 15 мм (для основи) та 5 мм (для бічних ділянок). Економія на товщині металу не вітається, оскільки вона веде до зменшення ваги агрегату та, як наслідок, погіршення його стійкості.
Вам потрібно вирізати заготовки станини (розміри дотримуються) і просвердлити в них два наскрізні отвори, потім боковушки приварюються до пластини основи. У нижній отвір потрібно змонтувати 2 підшипники, у верхнє - втулки під вал обертання.

Як вал можна використовувати пруток гладкої арматури 12 мм, яку попередньо потрібно відшліфувати і пофарбувати. Для втулки укладача можна брати пруток діаметром 10 мм, по всій довжині якого нарізається різьблення стандарту М12*1,0.

Шківи краще виточувати потрійні, проте враховуйте, що їхня сукупна товщина не повинна перевищувати 20 мм. За більшої товщини потрібно додатково збільшувати довжину валів на аналогічний розмір. Вказана у схемі комбінація шківів дозволяє застосовувати 54 різних кроки намотування. Якщо вам необхідно працювати з проводами діаметром менше 0.31 мм, знадобиться додатковий шків 12/16/20 мм, з ним ви зможете намотувати дроти 0.15 мм.

Для спорудження ручного приводу вам знадобиться великорозмірна шестерня та рукоять, які фіксуються за допомогою цангового затиску на верхньому валу. Завдяки використанню цанги ви зможете при необхідності перервати намотування фіксувати ручку, тим самим перешкоджаючи розмотування котушки.
Лічильник витків для намотувального верстата виготовляється зі звичайного калькулятора. Також вам знадобиться магніт із герконовим датчиком (можна купити в будь-якому магазині радіотехніки), висновки яких необхідно приєднати до контактів калькулятора на кнопці «=».
2.1 Як працювати на саморобному верстаті?
Отже, обладнання готове, як же на ньому працювати? Щоб встановити каркас для намотування, необхідно висунути з посадкового гнізда верхній вал на довжину, що дорівнює довжині оправи. Далі на вал монтується правий диск та оправлення котушки, поверх якої надівається сама котушка. На наступному етапі встановлюється лівий диск і гвинта гвинта, після чого все встановлюється в початкову позицію.

В отвір на верхньому валу розміщується гвоздик і проводиться центрування оправи, після якого каркас затискається гайкою. Подальші операції виконуються в наступній послідовності:
- На валу, що подає, розміщується придатною по діаметру шків.
- За допомогою обертання шківа укладальник переміщається в крайнє положення до однієї зі сторін котушки.
- На шків одягається пасик дроту - кільцем або вісімкою. Кінець дроту необхідно просунути під середнім валом, розмістити в жолобі укладача і зафіксувати на каркасі. Натяг дроту регулюється за допомогою затискачів на укладачі.
- На початку намотування на калькуляторі набирається комбінація «1+1», після чого проводиться обертання ручки. З кожним повним оборотом валу калькулятор самостійно збільшуватиме число на екрані на одиницю, тим самим вважаючи кількість витків дроту.
Оскільки дане обладнання має гранично простий пристрій, в якому відсутній будь-який контролер керування намотувальним верстатом, у процесі роботи вам потрібно постійно стежити за котушкою і при необхідності виправляти кабель на каркасі вручну.

Якщо ви хочете зробити верстат більш функціональним, потрібно ускладнити конструкцію додавши до неї контролер. Це дозволить автоматизувати робочий процес, проте для повністю механічного укладання в пару до контролера необхідно встановити кроковий двигун (підійде звичайний 24-вольтовий привід, що працює в режимі 44-60 кроків на оборот). Силові транзистори до цього комплекту підбираються виходячи з характеристик двигуна. Як контролер оптимально підійде прилад АТмега8, купити який можна за 150-200 рублів.