Mais vous pouvez créer un compteur sur une seule puce: un microcontrôleur universel programmable, intégrant une variété de périphériques et capable de résoudre un très large éventail de tâches. De nombreux microcontrôleurs ont une zone de mémoire spéciale - EEPROM. Les données enregistrées dans celui-ci (y compris pendant l'exécution du programme), par exemple le résultat actuel du comptage, sont également sauvegardées après une panne de courant.
Le compteur proposé utilise un microcontrôleur Attiny2313 de la famille d’AVR Almel. L’appareil met en oeuvre un compte inversé, produisant le résultat avec annulation de n insignifiant
ruche sur un indicateur LED à quatre chiffres, stockant le résultat dans EEPROM hors tension. Un comparateur analogique intégré au microcontrôleur permet de détecter rapidement une diminution de la tension d'alimentation. Le compteur garde en mémoire le résultat du comptage lors de la mise hors tension, le rétablissant à la mise sous tension et, comme le compteur mécanique, il est équipé d'un bouton de réinitialisation.
Le schéma de compteur est montré dans la figure. Six lignes du port B (PB2-PB7) et cinq lignes du port D (PDO, PD1, PD4-PD6) sont utilisées pour organiser l'indication dynamique du résultat du comptage sur l'indicateur à LED HL1. Les charges de collecteur des phototransistors VT1 et VT2 sont les résistances intégrées dans le microcontrôleur et le logiciel inclus dans le microcontrôleur, reliant les sorties correspondantes du microcontrôleur à son circuit d'alimentation.
Une augmentation du résultat du comptage de N par un se produit au moment de l'interruption de la connexion optique entre la diode émettrice VD1 et le phototransistor VT1, ce qui crée une différence de niveau croissante à l'entrée INT0 du microcontrôleur. Dans ce cas, le niveau de l'entrée INT1 doit être bas, c'est-à-dire que le phototransistor VT2 doit être éclairé par la diode émettrice VD2. Lors d'un front montant à l'entrée INT1, à un niveau bas de l'entrée INT0, le résultat diminue de un. Les autres combinaisons de niveaux et leurs différences aux entrées INT0 et INT1 ne modifient pas le résultat du comptage.
Lorsque la valeur maximale de 9999 est atteinte, le compte continue à partir de zéro. Si vous soustrayez l'unité de la valeur zéro, vous obtenez le résultat 9999. Si un compte à rebours n'est pas nécessaire, vous pouvez exclure la diode émettrice VD2 et le phototransistor VT2 du compteur et connecter l'entrée INT1 du microcontrôleur au fil commun. Le compte ira seulement pour augmenter.
Comme déjà mentionné, un comparateur analogique intégré au microcontrôleur sert de détecteur pour réduire la tension d'alimentation. Il compare la tension non stabilisée à la sortie du redresseur (pont de diodes VD3) avec la sortie stabilisée du stabilisateur intégré DA1. Le programme vérifie de manière cyclique l'état du comparateur. Une fois le compteur débranché du secteur, la tension sur le condensateur de filtrage du redresseur C1 chute et la tension stabilisée reste inchangée pendant un certain temps. Les résistances R2-R4 sont sélectionnées comme suit. que l'état du comparateur dans cette situation est inversé. Ayant trouvé cela, le programme parvient à enregistrer le résultat actuel du compte dans la mémoire EEPROM du microcontrôleur avant même sa fin en raison d'une mise hors tension. Lors de la prochaine activation, le programme lira le numéro enregistré dans l’EEPROM et l’affichera sur l’indicateur. Le compte sera poursuivi à partir de cette valeur.
En raison du nombre limité de broches du microcontrôleur, pour connecter le bouton SB1 et réinitialiser le compteur, la broche 13 est utilisée; elle sert d’entrée analogique inverseuse du comparateur (AIM) et simultanément à l’entrée "numérique" de PB1. Le diviseur de tension (résistances R4, R5) définit ici le niveau perçu par le microcontrôleur comme une logique élevée, auquel cas vous appuierez sur le bouton SB1. Cela n'affectera pas l'état du comparateur, car la tension à l'entrée AIN0 est toujours supérieure à celle de AIN1.
Lorsque le bouton SB1 est enfoncé, le programme affiche un signe moins dans toutes les catégories de l'indicateur et, une fois qu'il est relâché, il commence à compter à partir de zéro. Si vous appuyez sur le bouton pour mettre le compteur hors tension, le résultat actuel ne sera pas enregistré dans l'EEPROM et la valeur stockée y restera la même.
Le programme est conçu de telle sorte qu’il est facile de s’adapter au compteur avec d’autres indicateurs (par exemple, des cathodes communes), avec une configuration de carte de circuit imprimé différente, etc. Une petite correction de programme sera également nécessaire lors de l’utilisation d’un résonateur à quartz à une fréquence différente de plus de 1 MHz. à partir du spécifié.
Lorsque la tension de la source est de 15 V, la tension est mesurée au niveau des contacts 12 et 13 du panneau de microcontrôleur par rapport au fil commun (broche 10). Le premier doit être compris entre 4 et 4,5 V, et le second doit être supérieur à 3,5 V mais inférieur au premier. Ensuite, réduisez progressivement la tension de la source. Quand il tombe à 9 ... 10 V, la différence de tension aux bornes 12 et 13 doit devenir nulle, puis changer de signe.
Vous pouvez maintenant installer le microcontrôleur programmé dans le panneau, connecter le transformateur et lui appliquer une tension secteur. Après 1,5 ... 2 s, appuyez sur le bouton SB1. Le chiffre 0 sera affiché sur l'indicateur du compteur Si rien ne s'affiche sur l'indicateur, vérifiez à nouveau les valeurs de tension aux entrées AIN0.AIN1 du microcontrôleur. Le premier devrait être plus grand que le second.


Une fois le compteur démarré avec succès, il reste à vérifier l'exactitude du compte, en ombrant alternativement les phototransistors avec une plaque opaque pour les rayons infrarouges. Pour plus de contraste, il est conseillé de fermer les indicateurs avec un filtre en verre organique rouge.

Même si quelqu'un va récupérer le compteur sur Atiny2313 sans quartz,
J'ai programmé fyyu donc
source ASM
Micrologiciel
En radio amateur, il est souvent nécessaire de rembobiner / rebobiner divers enroulements de transformateurs, bobines d’arrêt, relais, etc.
Lors du développement de cette machine, les tâches suivantes ont été définies:
1. Petites dimensions.
2. Démarrage en douceur de la broche.
3. Comptez jusqu'à 10 000 tours (9999).
4. Enroulement avec pose de fil automatique. Pas de pose (diamètre du fil) 0,02 - 0,4mm.
5. Possibilité d'enrouler des enroulements de section sans reconfiguration.
6. La possibilité de fixer et d'enrouler les cadres sans trou central.

Figure 1
L'apparence de la bobineuse.
La composition de la machine à bobiner.
1. Bobine d'alimentation (bobine avec fil).
2. Freinage (mécanisme de freinage).
3. Moteur pas à pas pour centrer la canette.
4. Guides de mobilier de balle.
5. Obturateur de capteurs optiques pour le mécanisme d'alignement de la canette.
6. La poignée pour déplacer le positionneur vers une autre section lors de l'enroulement de bobinages de section.
7. Touches pour la commutation manuelle du sens de la pose.
8. LED de direction d’installation.
9. Positionneur de moteur pas à pas.
10. Rideaux de capteurs optiques à enroulement.
11. Positionneur de vis.
12. Guides de mobilier de balle.
13. Bobine de blessure.
14. Le moteur de remontage.
15. Le compteur de tours.
16. Boutons de configuration.
17. Capteur de synchronisation optique.
18. Contrôleur de vitesse.
L'appareil et le principe de fonctionnement.
Le nœud qui donne.
L'unité d'alimentation est conçue pour fixer la canette avec du fil, de différentes tailles, et pour assurer la tension du fil.
Il comprend un mécanisme de fixation de canettes et un mécanisme de freinage de la tige.

Figure 2
Le nœud qui donne.
Ralentir.
Sans freiner la bobine d’alimentation, le bobinage du fil sur les cadres sera lâche et un bobinage de haute qualité ne fonctionnera pas. Feutre de bande "2", le tambour "1" freine. En tournant le levier “3”, le ressort “4” se resserre - ajuste la force de freinage. Son freinage est configuré pour différentes épaisseurs de fil. Il utilise les pièces finies du magnétoscope.

Figure 3
Le mécanisme de freinage.
Bobines de centrage.
Les petites dimensions de la machine et l'emplacement à proximité immédiate de la bobine d'enroulement et de la bobine d'alimentation avec un fil ont nécessité l'introduction d'un mécanisme de centrage supplémentaire pour la bobine d'alimentation.


Figure 4, 5.
Mécanisme de centrage.
Lors de l'enroulement de la bobine, le fil de la canette agit sur le volet "5", réalisé sous la forme d'une "fourchette" et du moteur pas à pas "3", à travers la boîte de vitesses avec division 6 et la courroie crantée, le long des guides à rouleaux "4", déplace automatiquement la canette dans le sens souhaité.
Ainsi, le fil est toujours au centre, voir Fig. 4, Fig. 5:

Figure 6
Capteurs, vue arrière.
Composition et disposition des capteurs.
19. Capteurs optiques du mécanisme de centrage de la canette.
5. Obturez les capteurs de centrage de la canette qui se chevauchent.
20. Capteurs directionnels de commutation de position de volets se chevauchant.
21. Capteurs optiques pour commuter le positionneur directionnel.
Positionneur.
Stores “20” fig. 6 - la bordure sinueuse est définie. Le moteur pas à pas déplace le mécanisme d'empilage jusqu'à ce que le volet ferme l'un des capteurs “21” fig. 6, après quoi la direction de la pose change.
A tout moment, vous pouvez changer le sens de la pose avec les boutons “1” fig. 7

Figure 7
Empileur.
La vitesse de rotation du moteur pas à pas "9" Fig. 7, il est synchronisé à l'aide du capteur “10”, “11” Fig. 8, avec la rotation de la bobine d'enroulement et dépend du diamètre du fil réglé dans le menu. Le diamètre du fil peut être réglé entre 0,02 et 0,4 mm. En utilisant la poignée "8" Fig. 7, vous pouvez déplacer le positionneur entier sur le côté sans modifier la bordure sinueuse. Ainsi, il est possible d’enrouler une autre section dans des cadres à plusieurs sections.

Figure 8
Optosensor.
La composition du positionneur et du capteur optique (Fig. 7-8).
1. Touches pour la commutation manuelle du sens de la pose.
2. LED de direction d'installation.
3. Les obturateurs chevauchent les capteurs de commutation de direction du positionneur.
4. Roulement linéaire.
5. Noix Caprolon.
6. Vis mère. Diamètre 8mm, pas de filetage 1.25mm.
7. Guides de mobilier de balle.
8. La poignée pour déplacer le positionneur dans une autre section lors de l’enroulement de bobinages de section.
9. Moteur pas à pas.
10. Capteur de synchronisation optique.
11. Disque qui chevauche le capteur de synchronisation. 18 emplacements.
Unité de réception.

Figure 9
Unité de réception.


Figure 10, 11.
Unité de réception.
1. Le compteur de tours.
2. Moteur à commutation à grande vitesse.
3. Roue dentée.
4. Bouton "réinitialisation du compteur".
5. Réglage de la vitesse.
6. Basculez sur "Démarrer enroulement".
7. Fixation de la bobine d’enroulement.
La rotation de la bobine d'enroulement produit un moteur à commutation haute vitesse par l'intermédiaire d'une boîte à engrenages.
La boîte de vitesses se compose de trois vitesses avec une division commune de 18. Cela fournit le couple nécessaire à basse vitesse.
Le réglage de la vitesse du moteur est effectué en modifiant la tension d'alimentation.

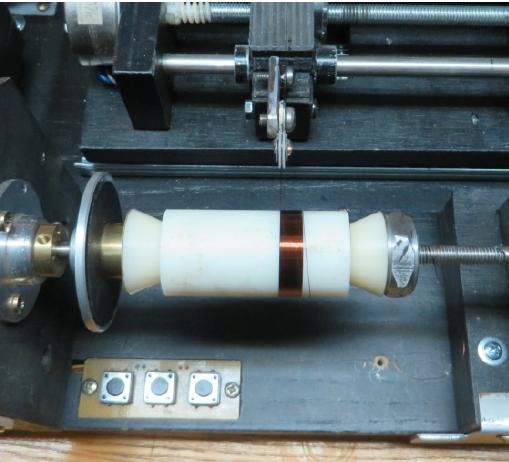
Figure 12, 13.
Fixation du cadre avec un trou.
La conception de l'unité de réception vous permet de fixer les deux cadres avec un trou central et les cadres sans tels trous, ce qui est clairement visible sur les figures.


Figure 14, 15.
Fixation du cadre sans trou.
Circuit électrique.

Figure 16.
Le circuit électrique de la bobineuse.
Tous les processus de la machine sont contrôlés par le microcontrôleur PIC16F877.
Une indication du nombre de tours et du diamètre du fil est affichée sur le voyant à quatre chiffres. Lorsque vous appuyez sur le bouton «D», le diamètre du fil est affiché, ainsi que le nombre de tours.
Pour changer le diamètre du fil, appuyez sur le bouton "D" et utilisez les boutons "+", "-" pour modifier la valeur. La valeur définie est automatiquement enregistrée dans l'EEPROM. Bouton "Zerro" - réinitialiser le compteur. Le connecteur "ISCP" sert à programmer le microcontrôleur.
P.S. Les dessins de la pièce mécanique n'existent pas, car le dispositif a été fabriqué en un seul exemplaire et la structure a été formée au cours du processus d'assemblage.
Dans cette conception, des éléments et des composants (non marqués) disponibles en démontage à partir de magnétoscopes et d'imprimantes ont été utilisés.
En aucun cas, je n’insiste sur la répétition exacte de cette conception, mais seulement sur la façon d’utiliser les nœuds correspondants dans mes conceptions.
La répétition de cet appareil est possible grâce à des radioamateurs expérimentés qui ont les compétences nécessaires pour travailler avec des mécaniciens et qui sont en mesure de modifier la conception pour s’adapter à leurs pièces mécaniques existantes.
La partie mécanique, respectivement, peut être mise en œuvre différemment.
Les boîtes de vitesses sur les moteurs peuvent appartenir à une division différente.
Éléments critiques:
Pour que le programme fonctionne correctement, il est nécessaire de respecter un certain nombre de conditions, à savoir:
Le capteur optique “17”, figure 1, peut être de conception différente, mais assurez-vous qu'il comporte 18 trous.
Une vis de positionnement, nécessairement par incréments de 1,25 mm, constitue le pas standard pour une vis de 8 mm de diamètre.
Moteur pas à pas du positionneur 48 étapes / tour, 7,5 degrés / étape - ce sont les moteurs les plus courants dans les équipements de bureau.
Démo de la machine:
Ci-dessous, en pièce jointe (dans les archives), tous les fichiers et matériels nécessaires à l’assemblage de la machine à bobiner sont rassemblés.
Si quelqu'un a des questions concernant le montage et la mise en service, posez-les sur le forum. Si possible, je vais essayer de répondre et d'aider.
Je vous souhaite à tous bonne chance dans votre travail et tout le meilleur!
Archive "Éolienne". "
Et je ne pensais à rien avant d’attirer l’attention d’un simple appareil de comptage. Le fait qu'il soit adapté pour compter le nombre de spires enroulées sur les bobines du transformateur ne faisait aucun doute, car il n'y a pas de plus grand plaisir que de faire l'un en pensant à l'autre. Mais à moins d’être dans un état de concentration complète (semblable à transe) et en même temps un compte à rebours au tambourin, est-ce possible? Et ce n’est pas difficile de s’adapter. En plus de trouver la même chose ou similaire. Il y a beaucoup de compteurs différents maintenant, et même un défectueux fera l'affaire. De plus, au début, il faut être prudent, en se souvenant de la position relative des pièces (et il est préférable de tout photographier) pour "vider" et éliminer tout excès.
Ainsi, du contenu interne, nous laissons des roues, des engrenages, des essieux numériques pour leur atterrissage et des supports d’axes que nous assemblons «en place» (tels qu’ils étaient avant le démontage). Les essieux de la crémaillère gauche sont de préférence collés. Sur les roues numériques, à côté du trou central, il y a encore une chose - un montage, il est placé sur le goujon avec une roue (un fil plat et élastique qui est retiré avant l’installation du capuchon). Sans cet assistant, rien n'en sortira. Dans ce cas, n'oubliez pas de mettre sur la roue motrice une sangle en caoutchouc (de préférence plate) de longueur appropriée avant de fixer le deuxième rack.

Dans le fond et dans le capuchon, au centre, nous réalisons des trous débouchants (par exemple de 3 mm de diamètre) pour leur fixation ultérieure à l'aide d'une vis et d'un écrou. Cela est nécessaire, car au cours de l'opération, la structure sera secouée, dans laquelle tout ce que nous aurons collecté s'effondrera constamment (vérifié). En outre, une coupure est faite dans le capuchon avec une largeur légèrement inférieure (pour que le passif ne s'envole pas) de la roue motrice numérique et une longueur à travers tout le capuchon. Une dernière chose ne sera pas superflue - deux trous dans la paroi latérale du capuchon, ils vous seront utiles lors de sa mise en place, car vous devez insérer les fentes supérieures des racks dans les rainures correspondantes (à propos, ne confondez pas les tailles différentes gauche et droite) à l'intérieur du capuchon. Ici à travers eux avec un tournevis et direct. Dans la partie inférieure, il est nécessaire de prévoir une paire de trous pour la fixation avec des vis ou des vis de la conception entière déjà assemblée au dispositif d'enroulement.

Comment et à quel endroit monter, du compteur assemblé au dispositif de remontage - une totale liberté de créativité. Mais leur connexion de travail est comme ça:

Une poulie (idéale) ou un manchon en plastique souple d’un diamètre intérieur un peu inférieur à 6 mm (à tirer) et d’un diamètre extérieur auquel un tour de l’arbre d’entraînement correspond à un tour de la roue motrice du compteur sont installés sur l’arbre d’entraînement du dispositif de remontage. L'option la plus simple consiste à envelopper un ruban adhésif approprié (par exemple, jusqu'à un diamètre de 20 mm) d'épaisseur suffisante (par exemple, jusqu'à un diamètre de 20 mm) sur un tube en PVC ou en plastique épais approprié d'une longueur de 10 mm et à commencer à accorder, si nécessaire, le rembobinage ou le rembobinage du ruban adhésif à l'épaisseur optimale.

En bref, nous obtenons le rapport de démultiplication Un à un. Surtout ne persistant pas, il s’est avéré commettre une erreur de +1 tour pour 150 tours de l’arbre du dispositif d’enroulement. Eh bien, l'erreur bien connue élimine complètement le résultat insatisfaisant du travail. Maintenant, pendant le travail, vous pouvez rêver, chanter des chansons et, si nécessaire, refléter correctement les attaques d'autres membres de la famille. En vous souhaitant du succès Babay.
Discuter de l'article VITKOV COUNTER
Il m’est arrivé qu’il fût chaud pour moi d’enrouler le transformateur, tout irait bien, mais la machine ne suffit pas, c’est parti d’ici! Une recherche sur Internet donnait quelques options possibles pour la construction de machines-outils, mais ce qui me dérangeait, c’était que le comptage des tours se faisait à nouveau à l'aide d'un compteur mécanique extrait d'un compteur de vitesse ou d'un vieux magnétophone, ainsi que d'un commutateur à lames avec calculatrices. Hmm ... Sur le plan mécanique, en ce qui concerne le compteur, je ne me suis pas arrêté absolument, je n’ai pas d’indicateur de vitesse pour le démontage, ni de calculatrice supplémentaire. Oui, et comme l'a dit le camarade. Serega de RadioKota: " De bons ingénieurs en électronique, souvent de mauvais mécaniciens! " Peut-être que je ne suis pas le meilleur ingénieur en électronique - mais le mécanicien est vraiment nul.
J'ai donc décidé de modifier le compteur électronique et de confier toute la partie mécanique de l'appareil au développement de la famille (heureusement, mon père et mon frère ont exactement les mêmes atouts en termes de mécanique).
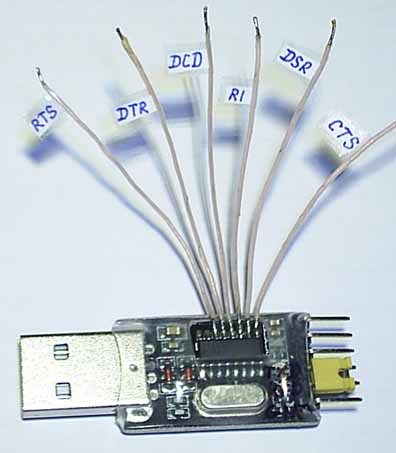
Ayant estimé un endroit à un autre, j’ai décidé que 4 chiffres d’indicateurs me suffiraient - ce n’est pas beaucoup - pas un peu, mais 10 000 tours. Le contrôleur gèrera toute la laideur, seuls mes favoris ATtiny2313 et ATmega8 semblaient complètement inconfortables de l'insérer dans un tel appareil de jeu. La tâche est simple et il est simple de la résoudre. Par conséquent, nous utiliserons ATtiny13 - probablement le MK le plus "mort" parmi ceux qui sont en vente pour le moment (je ne prends pas de PIC ou de MCS-51 - je ne peux que les programmer, mais je ne peux pas écrire de programmes pour eux). Les jambes de cette tinka ne suffisent pas, eh bien, personne ne nous dérange pour y attacher les registres à décalage! En tant que capteur de vitesse, j'ai décidé d'utiliser un capteur à effet Hall.
Esquisse d'un diagramme:
Je n’ai pas dit tout de suite à propos des boutons, mais où seraient-ils sans eux! Jusqu'à 4 pièces en plus de la réinitialisation (S1).
S2 - active le mode d'enroulement (le mode est défini par défaut) - chaque tour de l'axe avec une bobine augmente la valeur du nombre de tours de 1
S3 - le mode de remontage, à chaque tour, diminuera la valeur de 1. Le maximum peut être rembobiné à "0" - il ne roulera pas dans le moins :)
S4 - lecture des informations stockées dans l'EEPROM.
S5 - enregistrement dans l'EEPROM de la valeur actuelle + mode.
Naturellement, vous ne devez pas oublier de cliquer sur le bouton d'enroulement si vous voulez rembobiner les bobines, sinon elles s'additionneront. Il était possible de suspendre au lieu d'un capteur à effet Hall - 3 pièces ou un codeur de valeur et de modifier le programme du contrôleur afin qu'il choisisse lui-même le sens de rotation, mais je pense que dans ce cas, il est superflu.
Maintenant, pas beaucoup selon le schéma:
Comme vous pouvez le constater, il n’ya rien de surnaturel. Toute cette honte est alimentée à partir de 5V., Le courant consomme quelque chose dans les environs de 85mA.
À partir du capteur de hall TLE4905L (vous pouvez en essayer un autre, j'ai choisi le principe «ce qui est meilleur marché et disponible»), le signal est envoyé au contrôleur, une interruption est générée et la valeur actuelle change en fonction du mode sélectionné. Le contrôleur envoie des informations aux registres à décalage, à partir desquelles elles sont envoyées à des indicateurs à sept segments ou au clavier. J'ai utilisé sept segments avec une cathode commune, j'ai immédiatement eu un quatuor dans un bâtiment, mais personne ne dérange personne qui souhaite fixer deux doubles ou quatre simples connectant des anodes parallèles. Le point sur les indicateurs n'est pas utilisé, respectivement, la sortie H (dp) est suspendue dans les airs. Les indicateurs fonctionnent en mode dynamique, de sorte que les résistances avec une valeur nominale dans R3-R9 sont inférieures à celles calculées. Sur les transistors, les pilotes VT1-VT4 pour les indicateurs sont assemblés. Il était possible d'utiliser des microcircuits spécialisés tels que ULN2803, mais j'ai opté pour des transistors, pour la simple raison que je les avais accumulés: «comme la saleté», certains d'entre eux sont plus anciens que moi.
Boutons S2-S4 - un clavier à la matrice. Les "sorties" des boutons dépendent des mêmes conducteurs que les entrées des registres. En effet, après l'envoi des données du contrôleur aux registres des entrées SHcp et Ds, il peut y avoir un signal de n'importe quel niveau et cela n'affectera pas le contenu des registres. Les "entrées" des boutons sont suspendues aux sorties des registres, les informations sont transmises de la manière suivante: le contrôleur envoie d’abord des informations aux registres pour un transfert ultérieur vers les indicateurs, puis des informations pour balayer les boutons. Les résistances R14 à R15 sont nécessaires pour éviter un «combat» entre les jambes des registres / contrôleurs. Les informations sont envoyées à l'écran et le clavier est balayé à haute fréquence (le générateur interne dans tini13 est réglé sur 9,6 MHz). La rapidité avec laquelle nous n'essayons pas d'appuyer sur le bouton et de le relâcher entraîne de nombreuses opérations pendant la presse et, par conséquent, le bouton se déroulera jusqu'à la réunion. unité du contrôleur. Eh bien, une chose aussi désagréable que le cliquetis des contacts de bouton à nouveau.
À l’aide des résistances R16-R17, nous serrons notre clavier sur l’alimentation +, de sorte que, pendant un temps mort des sorties du clavier vers les entrées du contrôleur, une unité et non un état Z entraînant de faux positifs. Il était possible de se passer de ces résistances, les résistances internes en MK suffisent amplement, eh bien, oui, ma main ne s’est pas levée pour les enlever - Dieu sauve une personne sûre.
Le schéma semble être tout, pour ceux que ça intéresse, j'apporte une liste de composants. Immédiatement faire une réserve que les dénominations peuvent différer dans un sens ou dans un autre.
IC1 - microcontrôleur ATtiny13, peut être utilisé avec la lettre V. Le brochage de la version SOIC est identique à celui du schéma. Si quelqu'un souhaite appliquer QFN / MLF dans le cas, il le gère.
IC2-IC3 - Registres à décalage de 8 bits avec un verrou sur la sortie - 74HC595, sur la présentation que j'ai utilisée dans les boîtiers DIP de la carte dans le périphérique fini de la SOIC. Le brochage est le même.
IC4 est le capteur de hall unipolaire numérique TLE4905L. Lier par fiche technique R2 - 1k2, C2-C3 par 4n7. Lors de l'installation du capteur sur la machine, vérifiez de quel côté de l'aimant il réagit.
C1, C4 et C5 sont des condensateurs de filtrage de puissance, définis à 100n, ils doivent être installés au plus près des bornes d’alimentation des microcircuits.
R1 - avec une résistance nous serrons la jambe de réinitialisation à la puissance, 300 Ohm - et plus. Je mets 1k.
R3-R9 - Résistances limitant le courant pour les indicateurs. 33 Ohms - 100 Ohms, plus la résistance est élevée, plus le variateur brillera.
R10-R13 - limite le courant dans les circuits de base des transistors. Sur la mise en page se trouvait 510 ohms, vissé 430 ohms dans le conseil.
VT1-VT4 - KT315 avec n’importe quel index alphabétique, peut être remplacé par KT3102, KT503 et analogues.
R14-R15 comme il a été écrit ci-dessus pour empêcher un "combat", je pense que vous pouvez le mettre à partir de 1k et au-dessus, mais pas pour intimider au-dessus de 4k7. Lorsque R16-R17 vaut 300 Ohms, la résistance totale des résistances connectées en série ne doit pas dépasser 5k. Au cours de mes expériences avec l'augmentation de la résistance au-dessus de 5k, de fausses réponses des boutons sont apparues.
Après avoir vérifié le fonctionnement du compteur sur le tracé, il est temps d'assembler la pièce de fer dans le "périphérique terminé".
Il a élevé le tableau en SL, et probablement il ne l’a pas bien distribué - il l’a ajusté aux pièces disponibles, j’étais trop paresseux pour aller au marché en acheter d’autres. En général, étalez, imprimé sur un film transparent Lomond simple face pour imprimantes laser noir et blanc. Il a imprimé en négatif, en 2 exemplaires. Négatif - parce que le PP devait être fabriqué à l’aide d’une résine photorésistante en film et qu’il était à son tour NÉGATIF. Et en 2 copies, vous obtenez ainsi la couche de toner la plus opaque qui soit. Je n'ai pas encore envie et un vaporisateur TRANSPARENT 21
acheter.
Nous combinons des masques photographiques en les exposant "à la lumière", de sorte que les trous s’emboîtent parfaitement et se fixent à l’aide d’une agrafeuse régulière - vous devez aborder cette procédure de manière responsable, la qualité de la future carte en dépend à bien des égards.
Nous devons maintenant préparer le textolite en feuille. Quelqu'un le frotte avec un papier de verre fin, quelqu'un avec une gomme, et dernièrement, je préfère les options suivantes:
1. Si le cuivre n’est pas très obstrué par des oxydes, il suffit de l’essuyer avec un coton-tige imbibé d’ammoniac - oh et les ordures puantes, je vous le ferai savoir, je n’aime pas cette leçon, mais elle est rapide. Idéalement, le cuivre ne brillera pas après cela, mais l'alcool éliminera les oxydes et le panneau sera lissé.
2. Si le cuivre est sale, je le polis avec un cercle de feutre. Je l'accrocher sur une perceuse et le tour est joué. Vous ne devez pas être particulièrement zélé, je n’applique pas de pâte GOI, pour la gravure suivante, seul un cercle de feutre suffit. Rapide et efficace
En général, ils se sont préparés - je ne peux pas télécharger la photo, l’infection scintille comme un miroir et rien n’est visible sur la photo, le photographe de moi est trop moche.
Bon, d'accord, alors nous allons rouler la résine photosensible.
Je dois admettre que la résine photosensible a déjà expiré et que sa date d'expiration est dépassée et que le chien refuse de s'en tenir au tableau. Vous devez donc d'abord réchauffer le tableau. Je réchauffe avec un sèche-cheveux, mais vous pouvez aussi utiliser un fer à repasser. Bien sûr, il serait bien d’avoir une plastifieuse à ces fins, mais:
- Pâte je suis désolé pour lui maintenant
- quand la pâte n'était pas désolée c'était bêtement paresseux :)
Nous enroulons la résine photosensible sur la plaque chauffante sans oublier de retirer le film protecteur. Nous essayons de le faire avec le plus grand soin afin d’éviter toute bulle d’air entre la carte et le photorésist. Combattez avec eux plus tard - un âne séparé. Si les bulles apparaissent encore, je les perce avec une aiguille.
Vous pouvez vous mettre à l’écart et ne pas vous occuper des ordures, rappelant les photographes amateurs, l’activité principale de notre entreprise est le manque de lumière solaire et d’autres sources de rayons ultraviolets.
Après avoir roulé, je chauffe la planche avec un fer à repasser chaud dans le journal, traite les bulles perforées et le photorésistant adhère bien.
Ensuite, nous appliquons le gabarit au tableau, ici le tableau est recto verso, car le gabarit se trouvera des deux côtés du tableau. Placez ce "sandwich" sur une feuille de plexiglas et appuyez sur la deuxième feuille par-dessus. 2 feuilles sont nécessaires pour pouvoir, après exposition d’un côté, retourner doucement le tableau sans déplacer le masque photo.
Nous soulignons d'autre part. J'utilise cette lampe:
J'éclaire à une distance d'environ 150 mm pendant 7 minutes (la distance et le temps sont sélectionnés expérimentalement).
Ensuite, préparez une solution alcaline faible - une cuillerée à thé de soude par demi-litre d’eau. La température de l'eau n'est pas importante. Mélangez pour dissoudre tout le soda. Pour les mains, cette solution n'est pas dangereuse, au toucher, comment on obtient de l'eau savonneuse.
Nous retirons le film protecteur de notre carte et nous le lançons dans la solution, après quoi nous commençons activement à le frotter avec un pinceau - mais nous n’appuyons pas particulièrement dessus pour ne pas déchirer les pistes. Vous ne pouvez certainement pas frotter, mais alors il y a une option pour laver la résine photosensible sera:
- long
- tout sera lavé
mais pas l'un ou l'autre ne nous convient pas, donc trois.
nous obtenons quelque chose de similaire:
Nous lavons le circuit imprimé avec de l’eau, nous ne versons pas la solution, elle nous sera utile. Si certaines pistes se détachent encore ou que les bulles d’air de la piste se détériorent, il est nécessaire de retoucher ces endroits avec un zaponlak ou un marqueur spécial. Ensuite, nous empoisonnons le tableau. J'utilise du chlorure ferrique.
Après la gravure, nous rincons à nouveau la carte à l’eau et nous la remettons dans la solution alcaline pour éliminer le photorésist qui n’est plus nécessaire. Une heure suffit.
Ensuite nous tromper. Pour les petites planches ou les bijoux, j’utilise l’alliage Rose, pour la même carte: bêtement avec un fer à souder plat, je macule l’étain sur la planche. Dans ce cas, l’idée est de recouvrir le circuit imprimé avec du flux, j’utilise la colophane alcool habituelle.
Il peut sembler à certains que les pistes soient sorties pas très lisse - les pistes sont sorties directement :) ce sont les coûts de la méthode d'étamage avec un fer à souder, l'étain ne convient pas.
Dans la version finale, il n'y a pas de bouton de réinitialisation - eh bien, je n'avais nulle part où le coller sur le tableau, il n'y avait donc pas assez de place, et si le MK se bloque, cela signifie que je vais l'éteindre et le rallumer. Une diode est également apparue dans le circuit d’alimentation - protection contre les inversions de polarité. En ce qui concerne le reste des détails - je n’ai utilisé que ceux qui étaient à portée de main, donc ici et les boîtiers CMS et conventionnels.
Nous fixons le capteur sur la partie fixe de la machine, installons un aimant sur l’axe de rotation afin qu’il tourne entre 3 et 5 mm du capteur pendant la rotation. Eh bien, nous utilisons :)
Maintenant, bien sûr, merci à tous pour votre attention et à vos camarades GP1et Avreal pour aider au développement.
Pour tous les radioamateurs, ou les passionnés qui aiment les équipements de reproduction du son, l’éolienne est un équipement extrêmement populaire. De tels dispositifs sont utilisés pour le bobinage de bobines cylindriques monocouches et multicouches pour transformateurs.
Dans cet article, nous étudierons le dispositif et le principe de fonctionnement de la machine à enrouler, ainsi que des instructions pas à pas, à la suite desquelles vous pourrez fabriquer un tel équipement de vos propres mains.
1 Conception et fonctionnement
La bobineuse est indispensable dans la fabrication de produits similaires. Il existe deux types d'unités de ce type - automatiques et manuelles, ces dernières n'étant pratiquement pas répandues dans le secteur industriel en raison de leurs fonctionnalités limitées.
Cependant, l'encombrement, le poids élevé et le coût des bobineuses automatiques les rendent inapplicables dans la vie de tous les jours. Il est donc préférable de se procurer une machine à main pour la maison. La conception standard d'un tel dispositif comprend les éléments suivants:
- cadre porteur de deux poteaux verticaux en métal ou en bois, entre lesquels des axes horizontaux sont fixés (sur la crémaillère centrale - pour les plaques à roue, à l'extérieur - pour la bobine elle-même);
- grandes et petites vitesses transmettant le couple à la bobine;
- une poignée fixée sur un grand engrenage, à travers laquelle l'axe tourne avec la bobine;
- attaches - vis et écrous.
![]()
Le principe de fonctionnement d'un tel dispositif est extrêmement simple - la rotation de la poignée conduit à enrouler le fil ou le câble sur le cadre en rotation, le guide d'empilage qui déplace le fil dans un plan horizontal est responsable de la régularité de l'enroulement.
Le contrôle du nombre de tours peut être effectué à la fois visuellement et à l'aide de compteurs spéciaux, dont le plus simple est un compteur kilométrique standard. Dans les machines plus avancées, un commutateur à lames magnétique spécial est utilisé comme compteur.
1.1 Machines d'atelier
Parmi les unités de bobinage industrielles, l'enrouleur de câble SRN-05M3 est largement utilisé. Ce modèle a été mis en service à l'époque de l'URSS. Depuis, il s'est bien établi grâce à sa fiabilité et à ses performances élevées. Sur le marché secondaire, on peut trouver SRN-05M3 pour 15-20 mille roubles.

Le SRN-05M3 est en fonte, le poids de l'équipement est de 80 kg et ses dimensions: 877 * 840 * 142 cm La machine permet de bobiner des bobines à une couche, à deux couches et toroïdales en mode d'empilement automatique. Le diamètre minimum du câble est de 0,05 mm, le maximum de 0,5 mm. L'unité est équipée d'un moteur électrique monophasé de type UL-62, d'une puissance de 0,18 kW. La vitesse de rotation la plus élevée pendant l’enroulement est de 5100 tr / min.

Pour un usage domestique, le meilleur choix serait la machine manuelle NZ-1 (Chine). Malgré le pays d'origine, le NZ-1 est un équipement assez fiable et fonctionnel. L'unité est conçue pour bobiner des bobines d'un diamètre maximal de 150 mm et d'une largeur maximale de 100 mm. Le rapport de réduction est de 1:08 en mode de remontage rapide et de 1: 0,1 en mode lent. Vitesse maximale - pas plus de 1000 tr / min.
NZ-1 est équipé d'un compteur de type mécanique. Le corps est en métal, le bâti est en fonte. La machine est équipée d'une poulie, ce qui vous permet d'y connecter un moteur électrique via un entraînement par courroie et de travailler en mode automatique. Le coût d'un tel équipement varie entre 4 000 et 5 000 roubles.
1.2 Bobinier fait maison (vidéo)
2 Faire une machine à bricolage
L'enrouleur de câble présenté dans cette section de l'article vous permet de travailler avec des bobines sur un cadre carré, rond et rectangulaire d'une diagonale allant jusqu'à 200 mm. Il peut être équipé de différentes poulies, ce qui vous permet de modifier le pas de bobinage entre 0,3 et 3,2 mm.

Le diagramme ci-dessus montre le châssis de la machine. Pour assembler le lit, on utilise des feuilles de métal d’une épaisseur de 15 mm (pour le fond) et de 5 mm (pour les sections latérales). Économiser sur l'épaisseur du métal n'est pas le bienvenu, car il en résulterait une diminution du poids de l'unité et, par conséquent, une détérioration de sa stabilité.
Vous devrez découper les ébauches de la pièce (les dimensions sont respectées) et percer deux trous traversants, puis les côtés sont soudés à la plaque de base. 2 roulements doivent être montés dans le trou inférieur, les bagues situées sous l'arbre de rotation dans le trou supérieur.

En tant qu'arbre, vous pouvez utiliser une barre de renforcement lisse de 12 mm, qui doit d'abord être poncée et peinte. Pour le manchon d'empilage, vous pouvez utiliser une barre de 10 mm de diamètre sur toute la longueur de laquelle un filetage en M12 * 1.0 standard est coupé.

Il est préférable de moudre les poulies triples, cependant, gardez à l'esprit que leur épaisseur totale ne doit pas dépasser 20 mm. Avec une plus grande épaisseur, il sera nécessaire d'augmenter encore la longueur des arbres d'une taille similaire. La combinaison de poulies indiquée dans le diagramme permet d'appliquer 54 étapes d'enroulement différentes. Si vous devez travailler avec des câbles d’un diamètre inférieur à 0,31 mm, vous aurez besoin d’une poulie supplémentaire de 12/16/20 mm qui vous permettra de bobiner des câbles de 0,15 mm.

Pour la construction d'un entraînement manuel, vous aurez besoin d'un engrenage et d'une poignée de grande taille, qui sont fixés à l'aide d'une pince de serrage sur l'arbre supérieur. Grâce à l'utilisation d'une pince, vous pouvez interrompre l'enroulement si nécessaire pour fixer la poignée, empêchant ainsi le déroulement de la bobine.
Le compteur de bobines de la machine à bobiner est fabriqué à partir d’une calculatrice classique. Vous aurez également besoin d'un aimant avec un commutateur à lames (vous pouvez l'acheter dans n'importe quel magasin de radio), dont les résultats doivent être connectés aux contacts de la calculatrice à l'aide du bouton «\u003d».
2.1 Comment travailler sur une machine faite maison?
Et alors, le matériel est prêt, comment peut-il fonctionner? Pour installer la cage de bobinage, il est nécessaire de prolonger l’arbre supérieur de la prise de siège d’une longueur égale à celle du cadre. Ensuite, le disque droit et le mandrin de la bobine sont montés sur l’arbre, au-dessus duquel la bobine elle-même est usée. A l'étape suivante, le disque de gauche est installé et l'écrou est vissé, après quoi tout est installé dans sa position d'origine.

Un œillet est placé dans le trou de la tige supérieure et le cadre est centré, après quoi le cadre est serré avec un écrou. Les autres opérations sont effectuées dans l’ordre suivant:
- Une poulie de diamètre approprié est placée sur l’arbre d’alimentation.
- En tournant la poulie, l'empileur se déplace dans la position extrême, sur un côté de la bobine.
- Une ceinture de fil est mise sur une poulie - un anneau ou un huit. L’extrémité du fil doit être enfilée sous l’arbre central, malaxée dans la gouttière de l’empileur et fixée sur le châssis. La tension du fil est réglée à l'aide de pinces sur l'empileur.
- Au début de l'enroulement, la combinaison «1 + 1» est composée sur la calculatrice, après quoi la poignée est tournée. À chaque tour complet de l’arbre, la calculatrice augmente indépendamment le nombre à l’écran de un, comptant ainsi le nombre de tours de fil.
Étant donné que cet équipement dispose d’un dispositif extrêmement simple, dans lequel il n’existe pas de contrôleur pour contrôler l’enrouleur, vous devrez surveiller en permanence la bobine et, si nécessaire, régler manuellement le câble sur le cadre.

Si vous souhaitez rendre la machine plus fonctionnelle, vous devrez compliquer la conception en y ajoutant un contrôleur. Cela automatisera le flux de travail. Cependant, pour un couplage entièrement mécanique, un moteur pas à pas doit être installé sur le contrôleur (un variateur de vitesse normal de 24 volts fonctionnant sur un mode de 44 à 60 étapes par tour convient). Les transistors de puissance pour ce kit sont sélectionnés en fonction des caractéristiques du moteur. Le dispositif ATmega8, qui peut être acheté à 150-200 roubles, convient parfaitement comme contrôleur.