Men du kan bygga en räknare på bara ett chip - en universell programmerbar mikrokontroller som innehåller olika perifera enheter och som kan lösa ett mycket brett spektrum av uppgifter. Många mikrokontroller har ett speciellt minnesområde - EEPROM. Uppgifterna som registrerats i den (inklusive under programmets körning), till exempel det aktuella resultatet av räkningen, sparas även efter att strömmen har stängts av.
Den föreslagna mätaren använder en Attiny2313-mikrokontroller från Almel-familjen av AVR: er. Enheten implementerar ett omvändt konto och matar ut resultatet med annullering av obetydligt n
hive på en fyrsiffrig LED-indikator, lagra resultatet i EEPROM med strömmen av. En analog komparator inbyggd i mikrokontrollern används för att detektera en minskning i matningsspänningen i tid. Räknaren kommer ihåg resultatet av räkningen när strömmen stängs av, återställer den när den är påslagen, och på liknande sätt som den mekaniska räknaren, är den utrustad med en återställningsknapp.
Räknarens schema visas i figuren. Sex linjer av port B (PB2-PB7) och fem linjer i port D (PDO, PD1, PD4-PD6) används för att organisera dynamisk indikering av resultatet av räkningen på LED-indikatorn HL1. Samlarlasterna för VT1 och VT2 fototransistorerna är motstånden inbyggda i mikrokontrollern och mjukvaran som ingår i mikrokontrollern, och ansluter motsvarande utgångar från mikrokontrollern till dess effektkrets.
En ökning av resultatet av att räkna N med en inträffar vid ögonblicket för avbrott av den optiska anslutningen mellan den emitterande dioden VD1 och fototransistor VT1, vilket skapar en ökande nivåskillnad vid ingången INT0 till mikrokontrollern. I detta fall bör nivån vid ingången INT1 vara låg, dvs fototransistor VT2 bör belysas av den emitterande dioden VD2. Vid tidpunkten för en stigande kant vid ingång INT1, på en låg nivå vid ingång INT0, kommer resultatet att minska med en. Andra kombinationer av nivåer och deras skillnader vid ingångarna INT0 och INT1 förändrar inte räknaresultatet.
När det maximala värdet 9999 uppnås fortsätter kontot från början. Att subtrahera enheten från nollvärdet ger resultatet 9999. Om en nedräkning inte behövs kan du utesluta den avgivande dioden VD2 och fototransistor VT2 från räknaren och ansluta ingången INT1 från mikrokontrollern till den gemensamma kabeln. Kontot kommer bara att öka.
Som redan nämnts tjänar en analog komparator inbyggd i mikrokontrollern som en detektor för att minska matningsspänningen. Den jämför den instabila spänningen vid likriktarens utgång (diodbron VD3) med den stabiliserade utgången från den integrerade stabilisatorn DA1. Programmet kontrollerar cykliskt status för komparatorn. Efter att mätaren har kopplats från elnätet, sjunker spänningen på filterkondensatorn på likriktaren C1, och den stabiliserade mätaren förblir oförändrad under en tid. Motstånd R2-R4 väljs enligt följande. att komparatorns tillstånd i denna situation är omvänd. Efter att ha hittat detta lyckas programmet registrera det aktuella resultatet av räkningen i mikrokontrollerns EEPROM redan innan det avslutas på grund av avstängning. Nästa gång du sätter på den kommer programmet att läsa numret som spelats in i EEPROM och visa det på indikatorn. Kontot fortsätter från detta värde.
På grund av det begränsade antalet mikrokontrollstifter, för att ansluta SB1-knappen, återställa räknaren, används stift 13, som fungerar som den inverterande analoga ingången till komparatorn (AIM) och samtidigt som den "digitala" ingången till PB1. Spänningsdelaren (motstånd R4, R5) ställer här nivån som mikrokontrollern uppfattar som en hög logik. När du trycker på SB1-knappen kommer den att bli låg. Detta kommer inte att påverka komparatorns tillstånd, eftersom spänningen vid ingången AIN0 fortfarande är högre än vid AIN1.
När man trycker på SB1-knappen visar programmet ett minustecken i alla kategorier av indikatorn, och efter att den släppts börjar det räkna från noll. Om du trycker på knappen för att stänga av räknaren, kommer det aktuella resultatet inte att registreras i EEPROM, och värdet som lagras där kommer att förbli detsamma.
Programmet är utformat på ett sådant sätt att det är lätt att anpassa sig till räknaren med andra indikatorer (till exempel vanliga katoder), med en annan PCB-layout, etc. En liten programkorrigering krävs också när man använder en kvartsresonator till en frekvens som skiljer sig med mer än 1 MHz från det angivna.
När källans spänning är 15 V mäts spänningen vid kontakterna 12 och 13 på mikrokontrollpanelen relativt den gemensamma tråden (stift 10). Den första bör vara i intervallet 4 ... 4,5 V, och den andra bör vara mer än 3,5 V, men mindre än den första. Sänk sedan gradvis ner källans spänning. När den sjunker till 9 ... 10 V bör spänningsskillnaden över plintarna 12 och 13 bli noll och ändra sedan tecken.
Nu kan du installera den programmerade mikrokontrollern i panelen, ansluta transformatorn och applicera nätspänning på den. Efter 1,5 ... 2 s, tryck på SB1-knappen. Siffran 0 visas på räknarindikatorn. Om ingenting visas på indikatorn, kontrollera återigen spänningsvärdena på ingångarna AIN0.AIN1 på mikrokontrollern. Den första bör vara större än den andra.


När räknaren framgångsrikt startas återstår det att verifiera räkningens korrekthet, alternerande skuggning av fototransistorerna med en ogenomskinlig platta för infraröda strålar. För större kontrast rekommenderas att stänga indikatorerna med ett rött organiskt glasfilter.

Även om någon samlar in disken på Atiny2313 utan kvarts,
Jag programmerade fyyu så
aSM-källa
införing
I amatörradiopraxis finns det ofta behov av att spola tillbaka / spola tillbaka olika lindningar av transformatorer, choker, reläer, etc.
Vid utveckling av denna maskin ställdes följande uppgifter:
1. Små dimensioner.
2. Spindel mjukstart.
3. Räkna upp till 10 000 varv (9999).
4. Lindning med automatisk trådläggning. Läggstigning (tråddiameter) 0,02 - 0,4 mm.
5. Möjligheten att linda sektionslindningar utan omkonfiguration.
6. Möjligheten att fästa och linda ramar utan ett centralt hål.

Figur 1
Utseendet på den lindande maskinen.
Lindningsmaskinens sammansättning.
1. Matningsrulle (spole med tråd).
2. Bromsning (bromsmekanism).
3. Stegmotor för centrering av spolen.
4. Bollmöbelguider.
5. Slutare av optiska sensorer för spolinjusteringsmekanism.
6. Handtaget för att flytta positioneringsstället till ett annat avsnitt när lindning av sektionslindningar.
7. Knappar för manuell omkoppling av läggriktningen.
8. Lysdioder för installationsriktning.
9. Stegmotorns positionerare.
10. Gardiner av optiska sensorer gränsar lindning.
11. Skruv position.
12. Kulmöbelguider.
13. Sårrulle.
14. Lindningsmotorn.
15. Räknarens räknare.
16. Inställningsknappar.
17. Optisk tidgivarsensor.
18. Varvtalsregulator.
Enheten och principen för drift.
Den ger knuten.
Matarenheten är utformad för att säkra spolen med tråd i olika storlekar och säkerställa trådens spänning.
Den inkluderar en mekanism för att fästa spolar och en mekanism för bromsning av axeln.

Figur 2
Den ger knuten.
Saktar ner.
Utan att bromsa matningsrullen kommer lindningen av tråden på ramarna att vara lös och lindningen av hög kvalitet fungerar inte. Filttejp "2", trumman "1" bromsar. Genom att vrida spaken “3”, spänn fjädern “4” - justerar bromskraften. För olika trådtjocklekar är bromsningen konfigurerad. Den använder de färdiga delarna av videobandspelaren.

Figur 3
Bromsmekanismen.
Centrera rullar.
Maskinens små dimensioner och platsen i omedelbar närhet av sårspolen och matarspolen med en tråd krävde införandet av en ytterligare centreringsmekanism för matarspolen.


Figur 4, 5.
Centreringsmekanism.
Vid lindning av spolen verkar tråden från spolen på slutaren "5", gjord i form av en "gaffel" och stegmotorn "3", genom växellådan med avdelning 6 och tandremmen, längs rullstyrningarna "4", rör sig automatiskt spolen i önskad riktning.
Således är tråden alltid i mitten, se fig. 4, fig. 5:

Figur 6
Givare, bakifrån.
Sammansättning och arrangemang av sensorer.
19. Optiska sensorer för spolens centreringsmekanism.
5. Slutar överlappande sensorer för centrering av spolen.
20. Fönsterluckor som överlappar position växlar riktningssensorer.
21. Optiska sensorer för att växla riktningspositioner.
Positioner.
Persienner "20" fig. 6 - den lindande gränsen är inställd. Stegmotorn flyttar stapelmekanismen tills slutaren stänger en av sensorerna "21" fig. 6, varefter läggningsriktningen ändras.
När som helst kan du ändra läggningsriktningen med knapparna "1" fig. 7.

Figur 7
Stacker.
Stegmotorns "9" rotationshastighet Fig. 7, är den synkroniserad med hjälp av sensorn "10", "11" Fig. 8 med rotationsspolen och beror på diametern på tråduppsättningen i menyn. Trådens diameter kan ställas in 0,02 - 0,4 mm. Använda handtaget "8" Fig. 7, kan du flytta hela positionen till sidan utan att ändra den lindande gränsen. Således är det möjligt att vinda en annan sektion i ramar med flera sektioner.

Figur 8
Grossist sensor.
Positioneringen och den optiska sensorns sammansättning (fig. 7-8).
1. Knappar för manuell växling av läggriktningen.
2. Lysdioder för installationsriktning.
3. Fönsterluckor som överlappar sensorer för omkopplingslägesriktning.
4. Linjärt lager.
5. Caprolon mutter.
6. Blyskruv. Diameter 8mm, gängning 1,25 mm.
7. Kulmöbelguider.
8. Handtaget för att flytta positioneraren till ett annat avsnitt när lindning av sektionslindningar.
9. Stegmotor.
10. Optisk tidgivarsensor.
11. Disk som överlappar synkroniseringssensorn. 18 platser.
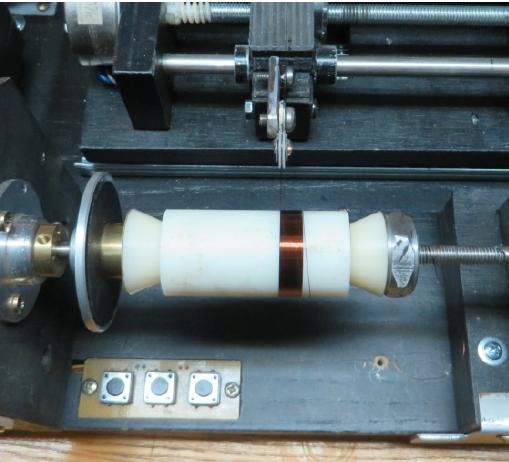
Mottagande enhet.

Figur 9
Mottagande enhet.


Figur 10, 11.
Mottagande enhet.
1. Räknarens räknare.
2. Kommutatormotor med hög hastighet.
3. Växelhjulet.
4. Knappen "räknare återställning".
5. Hastighetsjustering.
6. Växla "Starta lindning".
7. Fäst fästspolen.
Rotationsspolens rotation producerar en höghastighetskommutatormotor genom en växellåda.
Växellådan består av tre växlar med en gemensam uppdelning av 18. Detta ger det nödvändiga momentet vid låga hastigheter.
Justering av motorvarvtalet görs genom att ändra matningsspänningen.

Figur 12, 13.
Fäst ramen med ett hål.
Mottagningsenhetens utformning låter dig fixa båda ramar med ett centralt hål och ramar utan sådana hål, vilket är tydligt synligt i figurerna.


Figur 14, 15.
Fäst ramen utan hål.
Elektrisk krets.

Figur 16
Lindarens elektriska krets.
Maskinens alla processer styrs av mikrokontrollen PIC16F877.
En indikation på antalet varv och trådens diameter visas på den fyrsiffriga LED-indikatorn. När du trycker på “D” -knappen visas tråddiametern med antalet varv intryckt.
För att ändra trådens diameter, tryck på "D" -knappen och använd "+", "-" -knapparna för att ändra värdet. Det inställda värdet sparas automatiskt i EEPROM. Knappen "Zerro" - återställning av räknaren. "ISCP" -kontakten används för att programmera mikrokontrollern.
P.S. Ritningar av den mekaniska delen finns inte, eftersom anordningen tillverkades i en kopia, och strukturen bildades under monteringsprocessen.
I denna design användes element och komponenter (inte markerade) som är tillgängliga vid demontering från videobandspelare och skrivare.
I något fall insisterar jag på den exakta upprepningen av denna design, men bara hur jag använder noder från den i mina mönster.
Upprepning av denna enhet är möjlig av erfarna radioamatörer som har färdigheter att arbeta med mekanik och kan ändra designen så att de passar sina befintliga mekaniska delar.
Den mekaniska delen kan implementeras på olika sätt.
Växellådor på motorer kan ha en annan division.
Kritiska element:
För att programmet ska fungera korrekt är det nödvändigt att följa ett antal villkor, nämligen;
Den optiska sensorn “17”, figur 1., kan ha en annan design, men se till att ha 18 hål.
En positioneringsskruv, nödvändigtvis i steg om 1,25 mm, är standardhöjden för en skruv med en diameter på 8 mm.
Positioneringsstegsmotor 48 steg / varv, 7,5 grader / steg - dessa är de vanligaste motorerna i kontorsutrustning.
Demo av maskinen:
Nedan i bilagan (i arkivet) samlas alla nödvändiga filer och material för montering av lindningsmaskinen.
Om någon har några frågor angående montering och driftsättning, fråga dem på forumet. Om möjligt kommer jag att försöka svara och hjälpa till.
Jag önskar er all lycka till i ditt arbete och allt gott!
Arkiv "Lindningsmaskin". "
Och jag tänkte inte på någonting förrän jag fick ögonen på någon enkel räknare. Det faktum att det borde anpassas för att räkna antalet lindande trådvarv på transformatorspolarna var utan tvekan, eftersom det inte finns något större nöje än att göra en, tänka på den andra. Men om inte i ett tillstånd av fullständig koncentration (liknande trance) och samtidigt en tamburinräkning av varv, är det möjligt? Och det är inte svårt att anpassa sig. Förutom att hitta samma sak eller liknande. Det finns många olika räknare nu, och till och med en felaktig man kommer att göra. Dessutom måste det i början vara noggrant, komma ihåg delarnas relativa position (och det är bättre att fotografera allt) för att "tarm" och slänga ut allt överskott.
Så från det interna innehållet lämnar vi digitala hjul, växlar, axlar för deras landning och rackhållare av axlar som vi monterar "på plats" (som de stod före demontering). Axlarna i det vänstra stativet är företrädesvis limmade. På digitala hjul, bredvid det centrala hålet, finns det en sak till - en monteringsdel, den sätts på knoppen med ett hjul (en platt och elastisk tråd som tas bort innan du installerar locket). Utan denna assistent kommer inget av det. I det här fallet, glöm inte att sätta på gummihjulet (helst platt) med lämplig längd innan du sätter på det andra stället.

I botten och i locket, i mitten, gör vi genomgående hål (till exempel 3 mm i diameter) för att ytterligare fästas med en skruv och mutter. Detta är nödvändigt, eftersom det kommer att skaka strukturen under operationen, i vilket allt vi har samlat hela tiden faller isär (kontrolleras). Dessutom görs ett snitt i locket med en bredd på något mindre (så att passivet inte flyger av) på det drivande digitala hjulet och en längd genom hela locket. En sak till kommer inte att vara överflödig - två hål i sidoväggen på locket, de kommer att vara praktiska när det sätts på plats, eftersom du måste få de översta spåren på racken till motsvarande spår (förresten, inte förväxla vänster och höger olika storlekar) inuti locket. Här igenom dem med en skruvmejsel och direkt. I den nedre delen är det nödvändigt att tillhandahålla ett par hål för fästning med skruvar eller skruvar av hela den redan monterade konstruktionen till lindningsanordningen.

Hur och på vilken plats att montera, den monterade mätaren till lindningsanordningen - fullständig kreativitetsfrihet. Men deras arbetsförbindelse är så här:

En remskiva (detta är idealiskt) eller en hylsa gjord av mjuk plast med en innerdiameter på lite mindre än 6 mm (för att dra på en dragning) och en ytterdiameter där en vridning av drivaxeln motsvarar en varv av räknarens digitala hjul är monterade på lindningens drivaxel. Det enklaste alternativet är att linda in en lämplig tejp (säger upp till en diameter på 20 mm) med tillräcklig tjocklek (säga upp till en diameter på 20 mm) på ett lämpligt PVC eller tjockt plaströr med en längd på 10 mm och börja avstämma, om nödvändigt, spola tillbaka eller spola upp tejpen till optimal tjocklek.

Kort sagt, vi uppnår förhållandet mellan växelförhållandet EN TILL EN. Speciellt inte varaktig, visade det sig att göra ett fel på +1 varv för 150 varv av lindningens axel. Det välkända felet eliminerar helt otillfredsställande resultat av arbetet. Nu under arbetet kan du drömma, sjunga sånger och vid behov tillräckligt återspegla attackerna från andra familjemedlemmar. Önskar dig framgång babay.
Diskutera artikeln VITKOV COUNTER
Det hände så att det var varmt för mig att linda transformatorn, allt skulle gå bra, men maskinen räcker bara inte - det började härifrån! En sökning på Internet gav några möjliga alternativ för maskinverktygskonstruktion, men det som störde mig var att räkningen av svängarna gjordes igen med en mekanisk mätare utvinnad från en hastighetsmätare eller en gammal bandspelare, samt en vassbrytare med miniräknare. Hmm ... På mekanikern, när det gäller räknaren, stod jag inte helt, jag har inte hastighetsmätare för demontering eller några extra kalkylatorer. Ja, och som kamrat sa. Serega från RadioKota: " Bra elektroniska ingenjörer, ofta dålig mekanik! " Jag är kanske inte den bästa elektroniska ingenjören - men mekanikern är verkligen usel.
Därför bestämde jag mig för att bungla den elektroniska mätaren och överlåta hela den mekaniska delen av enheten till familjens utveckling (lyckligtvis har min far och bror exakt samma ess i mekanik).
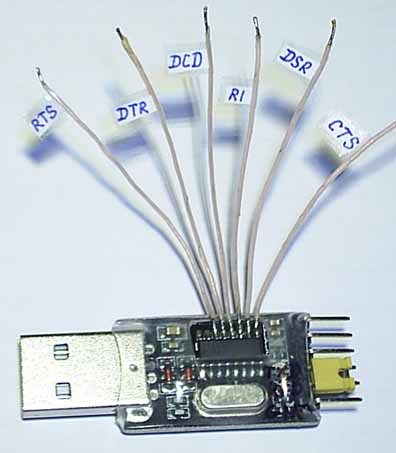
Efter att ha uppskattat en plats till en annan bestämde jag mig för att fyra siffror indikatorer skulle räcka för mig - det är inte mycket - inte lite, men 10 000 varv. Styrenheten kommer att hantera all fulahet, bara min favorit ATtiny2313 och ATmega8 verkade helt obehagligt att skjuta in den i en sådan uppspelningsenhet, uppgiften är enkel och det är enkelt att lösa det. Därför kommer vi att använda ATtiny13 - förmodligen den mest "döda" MK av de som är till försäljning just nu (jag tar inte PIC: er eller MCS-51 - jag kan bara programmera dessa, men jag kan inte skriva program för dem). Denna tinkas ben räcker inte, ja, så ingen stör oss att fästa skiftregistrerna till det! Jag bestämde mig för att använda en hallsensor som en hastighetssensor.
Skissade ett diagram:
Jag sa inte om knapparna - men var skulle de vara utan dem! Så många som fyra stycken förutom återställning (S1).
S2 - slår på lindningsläget (läget är inställt som standard) - med varje varv i axeln med en spole kommer det att öka antalet varv med 1
S3 - lindningsläget, respektive, med varje varv, kommer att minska värdet med 1. Maximumet kan rullas tillbaka till "0" - det kommer inte att rulla i minus :)
S4 - läsa informationen lagrad i EEPROM.
S5 - spela in i EEPROM för aktuellt värde + läge.
Naturligtvis får du inte glömma att klicka på lindningsknappen om du ska spola tillbaka spolarna, annars kommer de att lägga till. Det var möjligt att hänga istället för en hallsensor - 3 delar eller en valcoder och ändra styrprogrammet så att han själv valde rotationsriktningen, men jag tror att det i detta fall är överflödigt.
Nu inte mycket enligt schemat:
Som ni ser finns det inget övernaturligt i det. All denna skam matas från 5V., Strömmen förbrukar något i området 85mA.
Från TLE4905L-hallsensorn (du kan prova en annan, jag valde principen "vad som är billigare och tillgängligt"), signalen går till regulatorn, ett avbrott genereras och det aktuella värdet ändras, beroende på det valda läget. Styrenheten skickar information till skiftregistren, från vilken den i sin tur skickas till sju-segment indikatorer eller till tangentbordet. Jag använde sju segment med en gemensam katod, jag hade omedelbart en kvartett i en byggnad, men ingen stör någon som vill fästa två dubbla eller fyra enskilda som ansluter parallella anoder. Punkten på indikatorerna används inte respektive, utgången H (dp) hänger i luften. Indikatorerna fungerar i dynamiskt läge, så motstånden i R3-R9 med ett nominellt värde är mindre än de beräknade. På transistorer monteras VT1-VT4 drivrutiner för indikatorer. Det var möjligt att använda specialiserade mikrokretsar som ULN2803, men bestämde mig för transistorer, av det enkla skälet att jag hade samlat dem - "som smuts", några av dem är äldre än jag.
S2-S4-knappar - a la matrix-tangentbord. Knapparnas "utgångar" hänger på samma ledare som ingångarna i registren, faktum är att efter att ha skickat data från regulatorn till register vid ingångarna till SHcp och Ds kan det finnas en signal på vilken nivå som helst, och detta kommer inte att påverka innehållet i registerna. Knapparnas "ingångar" hänger på registerutgångarna, informationen överförs på följande sätt: först skickar styrenheten information till registerna för efterföljande överföring till indikatorerna, sedan skickar information för att skanna knapparna. Motstånd R14-R15 behövs för att förhindra en "strid" mellan benen på registren / kontrollen. Information skickas till skärmen och tangentbordet skannas med en hög frekvens (den interna generatorn i tini13 är inställd på 9,6 MHz), så hur snabbt vi inte skulle försöka trycka och släppa knappen kommer många operationer att ske under pressen och följaktligen kommer knappen att köras till mötet enhet från regulatorn. Tja, en sådan obehaglig sak som att skratta med knappkontakt igen.
Med hjälp av R16-R17-resistorerna drar vi vårt tangentbord till + strömförsörjningen, så att under en stillestånd från tangentbordets utgångar till styrenheten matar in en enhet och inte Z-tillstånd som innebär falska positiver. Det var möjligt att klara sig utan dessa motstånd, interna uppdragsmotstånd i MK är tillräckligt bra, ja, min hand räckte inte för att ta bort dem - Gud räddar en säker person.
Schemat verkar vara allt, för de intresserade tar jag med en lista över komponenter. Boka omedelbart att valörerna kan skilja sig åt i en eller annan riktning.
IC1 - mikrokontroller ATtiny13, kan användas med bokstaven V. Pinout för versionen i SOIC är densamma som i diagrammet. Om någon har en önskan att tillämpa QFN / MLF i fallet hanterar han det.
IC2-IC3 - 8-bitars skiftregister med en spärr på utgången - 74HC595, på den layout som jag använde i DIP-fall på kortet i den färdiga enheten i SOIC. Pinout är samma.
IC4 är TLE4905L digital unipolär hallsensor. Bindning med datablad R2 - 1k2, C2-C3 av 4n7. När du installerar sensorn på maskinen, kontrollera vilken sida av magneten den reagerar på.
C1, C4 och C5 är kraftfiltreringskondensatorer, jag ställer in på 100n, de bör installeras så nära som möjligt till tillslutningsterminalerna för mikrokretsarna.
R1 - med ett motstånd drar vi återställningsbenet till makten, 300 Ohm - och vidare. Jag satte 1k.
R3-R9 - strömbegränsande motstånd för indikatorer. 33 ohm - 100 ohm, desto större motstånd, kommer motsvarande dimmer att lysa.
R10-R13 - begränsa strömmen i baskretsarna för transistorer. På layouten stod 510 ohm, skruvade 430 ohm i brädet.
VT1-VT4 - KT315 med valfri bokstavsindex, kan ersättas av KT3102, KT503 och analoger.
R14-R15 som det skrevs ovan för att förhindra en "fight", jag tror att du kan sätta den från 1k och högre, men inte för att mobba över 4k7. När R16-R17 är 300 ohm, bör det totala motståndet för de seriekopplade motstånden inte överstiga 5 k, under mina experiment med att öka motståndet över 5 k, dök falska svar från knapparna upp.
Efter att ha kontrollerat hur räknaren fungerar på layouten är det dags att montera järnstycket i den "färdiga enheten".
Han avlade brädet i SL, och troligen distribuerade den inte optimalt - han anpassade den till tillgängliga delar, jag var för lat för att gå till marknaden för att köpa andra. I allmänhet, spridning, tryckt på en transparent ensidig film Lomond för svarta och vita laserskrivare. Han tryckte negativt, i två exemplar. Negativt - eftersom PP skulle göras med hjälp av en filmfotoresist, och han i sin tur var NEGATIV. Och i två exemplar - så att du kombinerar det mest ogenomskinliga tonerlagret. Jag har ingen önskan ännu och en sprayflaska TRANSPARENT 21
att köpa.
Vi kombinerar fotomasker, utsätter dem "för ljuset", så att hålen passar perfekt ihop, vi fixar med en konventionell häftapparat - du måste närma dig denna procedur på ett ansvarsfullt sätt, kvaliteten på det framtida kortet beror på det i många avseenden.
Nu måste vi förbereda foliet textolit. Någon gnider det med ett fint sandpapper, någon med ett radergummi och nyligen föredrar jag följande alternativ:
1. Om koppar inte är mycket tilltäppt med oxider räcker det att torka av det med en tappar doppad i ammoniak - åh och stinkigt skräp kommer jag att rapportera till dig, jag gillar inte den här lektionen, men det är snabbt. Helst kommer koppar inte att lysa efter detta, men alkoholen kommer att tvätta bort oxiderna och brädet blir jämn.
2. Om koppar är smutsigt anständigt, polerar jag det med en filtcirkel. Jag hänger den på en borr och voila. Du behöver inte vara särskilt ivriga, jag applicerar inte GOI-pasta, för den efterföljande etsningen räcker det bara med en filtcirkel. Snabbt och effektivt.
I allmänhet förberedde de sig - jag kan inte ladda upp fotot, infektionen glittrar som en spegel och ingenting är synligt på fotot, fotografen från mig är för usel.
Okej, då rullar vi fotoresisten.
Jag måste erkänna att fotoresisten redan har gått ut och utgångsdatumet och hunden vägrar att hålla sig vid brädan, så du måste värma brädet först. Jag värmer med en hårtork, men du kan också använda ett strykjärn. Det vore naturligtvis trevligt att ha en laminator för dessa ändamål, men:
- deg Jag tycker synd om honom nu
- när degen inte var ledsen var den dumt lat :)
Vi rullar fotoresisten på hetbrädet och glömmer inte att ta bort skyddsfilmen. Vi försöker göra detta så noggrant som möjligt så att det inte finns några luftbubblor mellan brädet och fotoresisten. Slåss med dem senare - en separat röv. Om bubblorna fortfarande dyker upp, sticker jag dem med en nål.
Du kan rulla i vilket ljus som helst och inte delta i skräp, minns amatörfotografer. Det viktigaste i vår verksamhet är bristen på solljus och andra källor till ultraviolett strålning.
Efter att ha rullat, värmer jag brädan med ett hett järn genom tidningen, punkterade bubblor behandlas med detta, och fotoresisten fastnar hårt.
Därefter tillämpar vi mallen på brädet, här är brädet dubbelsidig, eftersom mallen kommer att finnas på båda sidor av brädet. Lägg denna "sandwich" på ett ark med plexiglas och tryck på det andra arket ovanpå. Det krävs två ark så att du efter en exponering av en sida kan vända kortet försiktigt utan att flytta fotomaskinen.
Vi belyser å andra sidan. Jag använder denna lampa:
Jag lyser från ett avstånd av cirka 150 mm i 7 minuter (avstånd och tid väljs experimentellt).
Förbered sedan en svag alkalisk lösning - en tesked soda per halv liter vatten. Vattentemperatur är inte viktig. Rör om att lösa upp all soda. För händer är denna lösning inte farlig, beröring hur tvålvatten erhålls.
Vi tar bort skyddsfilmen från vårt bräde och kastar den i lösningen, varefter vi aktivt börjar gnugga den med en borste - men vi trycker inte särskilt på den för att inte riva av spåren. Du kan verkligen inte gnugga, men då finns det ett alternativ att tvätta bort fotoresisten kommer att vara:
- lång
- allt kommer att tvättas bort
men inte det ena eller det andra är inte lämpligt för oss, därför tre.
vi får något liknande:
Vi tvättar kretskortet med vatten, häller inte ut lösningen - det kommer fortfarande att vara användbart för oss. Om vissa spår till och med avskalats under skivbrädan eller luftbubblorna på banan förstördes, är det nödvändigt att retuschera dessa platser med en zaponlak eller en speciell markör. Därefter förgiftar vi brädan. Jag använder järnklorid.
Efter etsning sköljer vi brädan igen med vatten och kastar tillbaka den i den alkaliska lösningen för att tvätta bort den fotoresist som inte längre behövs. En timme räcker.
Nästa vi lurar. För små brädor eller mycket smycken använder jag Rose-legeringen, för samma bräda använder jag den - jag smetar dumt tennet på brädet med en plattspets lödkolv. I det här fallet är tanken att täcka kretskortet med flöde, jag använder den vanliga alkoholhartset.
Det kan tyckas för vissa att spåren kom ut inte så jämna - spåren kom ut raka :) det här är kostnaderna för toningsmetoden med en lödkolv, tennet ligger inte jämnt.
I den färdiga versionen finns det ingen återställningsknapp - ja, jag hade ingenstans att fästa den på brädet, så det finns inte tillräckligt med utrymme, och om MK hänger, betyder det att jag stänger av strömmen och slår på den igen. En diod dök också upp i kraftkretsen - skydd mot omvänd polaritet. När det gäller resten av detaljerna - jag använde bara de som fanns till hands, så här och SMD och konventionella kapslingar.
Vi fixerar sensorn på den stationära delen av maskinen, installerar en magnet på rotationsaxeln så att den roterar 3-5 mm från sensorn under rotation. Tja, vi använder :)
Nu säkert, tack alla för er uppmärksamhet och kamrater GP1och Avreal för hjälp med utvecklingen.
För alla radioamatörer eller entusiaster som är förtjust i ljudåtergivningsutrustning är lindningsmaskinen en extremt populär utrustning. Sådana anordningar används för lindning av enskikts- och flerskiktscylindriska spiraler för transformatorer.
I den här artikeln kommer vi att studera enheten och principen för lindning av maskinen, och också överväga steg-för-steg-instruktioner, varefter du kan göra sådan utrustning med dina egna händer.
1 Design och princip för drift
Lindningsmaskinen är oumbärlig vid tillverkningen av liknande produkter. Det finns två typer av sådana enheter - automatisk och manuell, medan de senare praktiskt taget inte är utbredda inom industrisfären på grund av begränsad funktionalitet.
De övergripande dimensionerna, den stora vikten och kostnaden för automatiska lindrar gör dem emellertid inte tillämpliga i vardagen, därför är det bättre att få en handhållen maskin till huset. Standardutformningen för en sådan anordning består av följande element:
- stödram av två vertikala stolpar av metall eller trä, mellan vilka horisontella axlar är fixerade (på det centrala stativet - för plattor med ett hjul, på det yttre - för själva spolen);
- stora och små växlar som överför vridmoment till spolen;
- ett handtag fixerat på ett stort växel, genom vilket axeln roterar med spolen;
- fästelement - skruvar och muttrar.
![]()
Funktionen för en sådan anordning är extremt enkel - rotation av handtaget leder till lindning av tråden eller kabeln på den roterande ramen, staplarstyrningen ansvarar för likformigheten hos lindningen, som förflyttar tråden i ett horisontellt plan.
Styrningen av antalet varv kan utföras både visuellt och med hjälp av specialräknare, varav den enklaste är en vanlig cykelmätare. I mer avancerade maskiner används en speciell magnetisk vredströmbrytare som räknare.
1.1 Handla maskiner
Bland industriella lindningsenheter används SRN-05M3 kabellindare i stor utsträckning. Denna modell togs i drift under Sovjetunionens dagar, och sedan dess har den etablerat sig väl tack vare sin höga tillförlitlighet och prestanda. På sekundärmarknaden finns SRN-05M3 för 15-20 tusen rubel.

SRN-05M3 är gjord av gjutjärn, utrustningens vikt är 80 kg, mått - 877 * 840 * 142 cm. Maskinen låter dig linda enskikts-, dubbelskikts- och toroidspolar i automatisk staplingsläge. Minsta kabeldiameter är 0,05 mm, den maximala är 0,5 mm. Enheten är utrustad med en enfas elektrisk motor typ UL-62, vars effekt är 0,18 kW. Den högsta rotationshastigheten under lindningen är 5100 rpm.

För hushållsbruk är det bästa valet den manuella maskinen NZ-1 (Kina). Trots ursprungslandet är NZ-1 ganska tillförlitlig och funktionell utrustning. Enheten är konstruerad för lindningsspolar med en diameter upp till 150 mm, med en maximal bredd på högst 100 mm. Växelförhållandet är 1:08 i snabblindningsläge och 1: 0,1 långsamt. Maximal hastighet - högst 1000 varv / minut.
NZ-1 är utrustad med en mekanisk räknare. Kroppen är gjord av metall, bärramen är gjord av gjutjärn. Maskinen är utrustad med en remskiva som gör att du kan ansluta en elektrisk motor till den genom en remdrift och arbeta i automatiskt läge. Kostnaden för sådan utrustning varierar mellan 4-5 tusen rubel.
1.2 Hemmagjord lindning (video)
2 Göra en DIY-lindningsmaskin
Kabellindningsmaskinen som presenteras i detta avsnitt av artikeln gör att du kan arbeta med spolar på en fyrkantig, rund och rektangulär ram med en diagonal på upp till 200 mm, den kan utrustas med olika remskivor, som gör att du kan ändra lindningsgraden inom 0,3-3,2 mm.

Diagrammet ovan visar maskinens ram. För att montera sängen används metallplattor med en tjocklek av 15 mm (för basen) och 5 mm (för sidosektionerna). Att spara på tjockleken på metallen är inte välkommen, eftersom det leder till en minskning av enhetens vikt och som en följd av detta en försämring av dess stabilitet.
Du måste klippa ut bäddarna på sängen (dimensionerna respekteras) och borra två genomgående hål i dem, sedan svetsas sidorna till bottenplattan. 2 lager måste monteras i det nedre hålet, bussningar under rotationsaxeln i det övre hålet.

Som axel kan du använda en stång med jämn förstärkning 12 mm, som först måste slipas och målas. För stapelhylsan kan du ta en stång med en diameter på 10 mm, längs hela längden som en tråd med standard M12 * 1.0 skärs.

Det är bättre att slipa tredubbla remskivor, men tänk på att deras totala tjocklek inte bör överstiga 20 mm. Med en större tjocklek kommer det att behövas ytterligare öka längden på axlarna med en liknande storlek. Remskivakombinationen som visas i diagrammet gör det möjligt att applicera 54 olika lindningssteg. Om du behöver arbeta med ledningar med en diameter på mindre än 0,31 mm, behöver du ytterligare en remskiva på 12/16/20 mm, med den kan du spola 0,15 mm ledningar.

För konstruktion av en manuell drivenhet behöver du ett stort växel och handtag som är fixerade med en spännklämma på den övre axeln. Tack vare användning av en spännhylsa kan du vid behov avbryta lindningen för att fixera handtaget och därmed förhindra spolning.
Spolräknaren för lindningsmaskinen är tillverkad av en konventionell räknare. Du kommer också att behöva en magnet med en reed-switch (du kan köpa den i valfri radioaffär), vars resultat måste vara anslutna till kontakterna på miniräknaren på knappen "\u003d".
2.1 Hur man arbetar på en hemmagjord maskin?
Och så är utrustningen klar, hur kan den fungera? För att installera lindningsburet är det nödvändigt att förlänga den övre axeln från sittplatsen med en längd som är lika med ramens längd. Därefter monteras den högra skivan och spindelns spindel på axeln, på vilken spolen själv bärs. I nästa steg installeras den vänstra skivan och muttern skruvas, varefter allt installeras i sitt ursprungliga läge.

En nejlika placeras i hålet på den övre axeln och ramen är centrerad, varefter ramen kläms fast med en mutter. Ytterligare operationer utförs i följande sekvens:
- En remskiva med lämplig diameter placeras på matningsaxeln.
- Genom att rotera remskivan flyttas staplaren till det yttersta läget, till en sida av spolen.
- Ett trådband läggs på en remskiva - en ring eller en åtta. Slutet på tråden måste gängas under den mellersta axeln, knådas i rännan på staplaren och fixeras på ramen. Trådspänningen justeras med hjälp av klämmor på staplaren.
- I början av lindningen slås kombinationen ”1 + 1” på räknaren, varefter handtaget roteras. Med varje fullständig omvandling av axeln kommer räknemaskinen oberoende att öka antalet på skärmen med en och därmed räkna antalet trådvarv.
Eftersom denna utrustning har en extremt enkel enhet, i vilken det inte finns någon styrenhet för att styra lindningsmaskinen, måste du under drift ständigt övervaka spolen och vid behov justera kabeln manuellt på ramen.

Om du vill göra maskinen mer funktionell måste du komplicera designen genom att lägga till en styrenhet till den. Detta automatiserar arbetsflödet, men för en fullständig mekanisk koppling måste en stegmotor installeras på regulatorn (en vanlig 24-voltsdrivning som fungerar i läget 44-60 steg per varv är lämplig). Krafttransistorer för detta kit väljs utifrån motorens egenskaper. ATmega8-enheten, som kan köpas för 150-200 rubel, är optimalt lämplig som styrenhet.